





























41
not receive instructions.
3
Alarm
(
E-260
)
Note:
1) When the deceleration stops, the braking torque is also P3-32, and the stopping overtime time
also plays a role in the overrun process.
2) In position control, there may be position deviation pulse when the motor is stopped by
over-range signal. To remove the position deviation pulse, the clearance signal /CLR must be input. If
the servo unit still receives pulses, these pulses will accumulate until the servo unit alarms.
5.2.4 Overrun prevention (P-OT, N-OT)
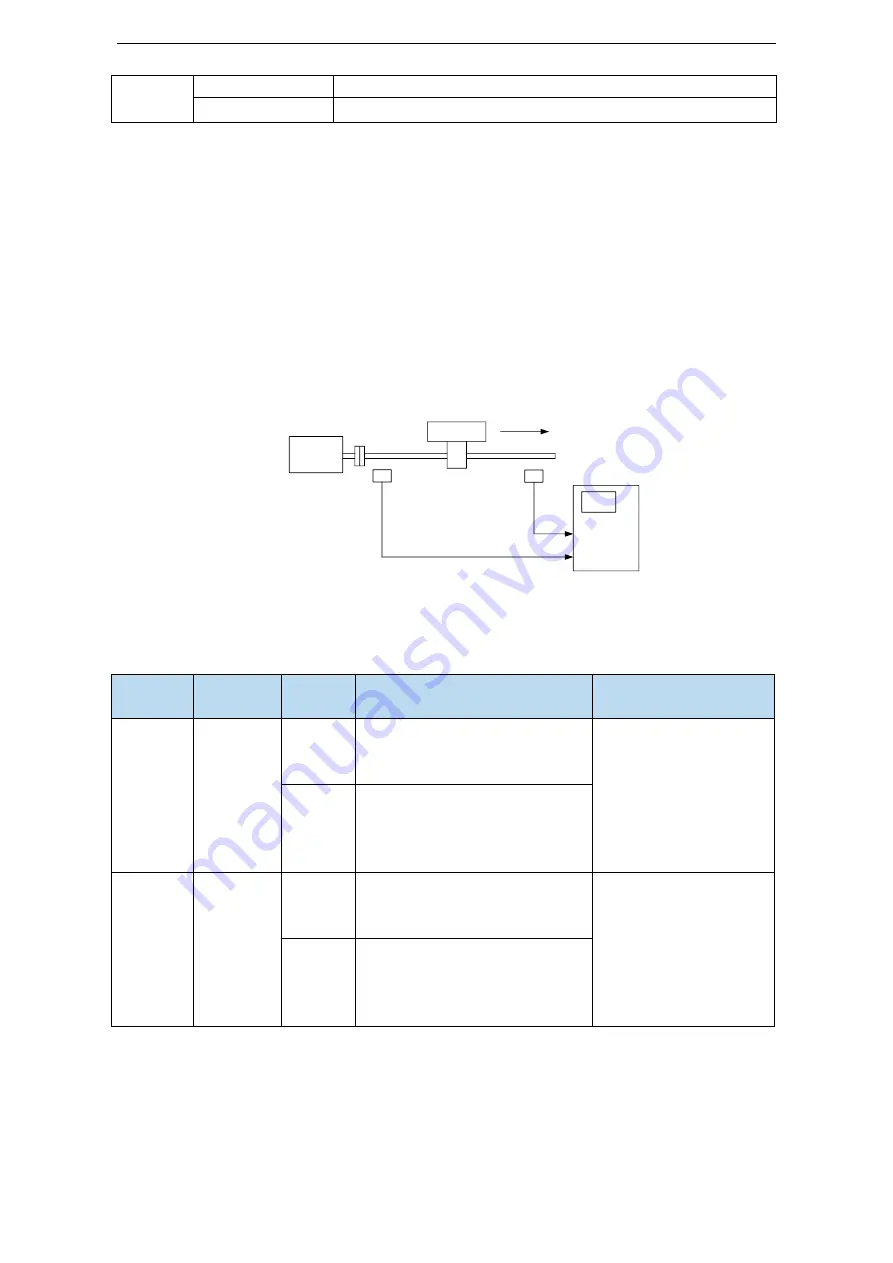
1. Use of Overrun Signal
The over-run prevention function of the servo unit refers to the safety function of forcing the servo
motor to stop by inputting the signal of the limit switch when the movable part of the machine exceeds
the designed safe moving range. Be sure to connect the limit switch as shown below.
CN1
SI3
SI4
Servo
motor
Limit
switch
Limit
switch
POT
NOT
Motor forward
direction
Servo unit
Rotary applications such as round tables and conveyors do not need the function of overrun prevention.
At this time, there is no need to connect the overrun prevention with input signals.
2. Set the overrun signal
Parameter
Signal
name
Setting
Meaning
Range
P5-22
Forward
prohibition
/P-OT
n.0003
(default)
When the SI3 terminal signal is
turned on, the forward rotation of
the motor is forbidden.
The parameter range is
0000-0014.
can be assigned to other
input terminals through
P5-22.
n.0013
Forward rotation of motor is
prohibited when SI3 has no signal,
and forward rotation of motor is
allowed when SI3 has signal.
P5-23
Reverse
prohibition
/N-OT
n.0004
(default)
When SI4 terminal signal is turned
on, motor reverse rotation is
prohibited.
The parameter range is
0000-0014.
can be assigned to other
input terminals through
P5-23.
n.0014
When SI4 has no signal, it is
forbidden to reverse the motor;
when SI4 has signal, it is allowed
to reverse the motor.
Содержание DS5E Series
Страница 1: ...DS5E DS5L series servo drive User manual WUXI XINJE ELECTRIC CO LTD Data No SC5 04 20190108 1 1 ...
Страница 2: ......
Страница 23: ...15 DS5E 45P5 PTA DS5E 47P5 PTA Unit mm 135 0 251 0 239 5 123 5 4 φ6 0 ...
Страница 105: ...97 2 select jog setting or manual setting to configure the inertia estimation trip 3 Set the auto tuning interface ...
Страница 117: ...109 4 Click ok to start the inertia identification 5 Configure the auto tuning parameters ...
Страница 173: ...165 ...







































































