





























39-
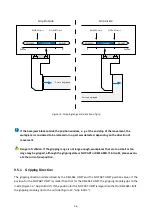
EN = 1, HOME = 0
CMD = 0
INDEX = [Grip Index]
RELEASED = 1 ?
no
yes
Part released
Base Jaws
moving
no
yes
FAULT = 1 ?
Error handling
Acknowledge error
9.9
Troubleshooting
If the gripping module is in the FAULT state during normal operation, an internal error has occurred that
prevents the correct function of the gripping module. Possible error causes are listed in chapter 11.4In addi-
tion to theFAULT state, a corresponding system event is triggered that describes the cause of the error in
more detail, see Table 13.
To acknowledge an error, the gripping module must be disabled and then enabled again.
Figure 17 shows the required program sequence for acknowledging an error. If the error cannot be acknowl-
edged, try to restart the gripping module by interrupting the power supply. If the error persists, contact Weiss
Robotics technical support. There may be a defect in the gripping module.
Possible loss of workpieces. Move the module into a safe position before acknowledging the error.
Figure 16: Program flow release part