





























13.6 Installation
→
TCP Configuration
CAUTION:
Using the robot with an installation loaded from a USB drive is not
recommended. To use an installation stored on a USB drive, first load
it and then save it in the local
programs
folder using the
Save As. . .
button.
13.6
Installation
→
TCP Configuration
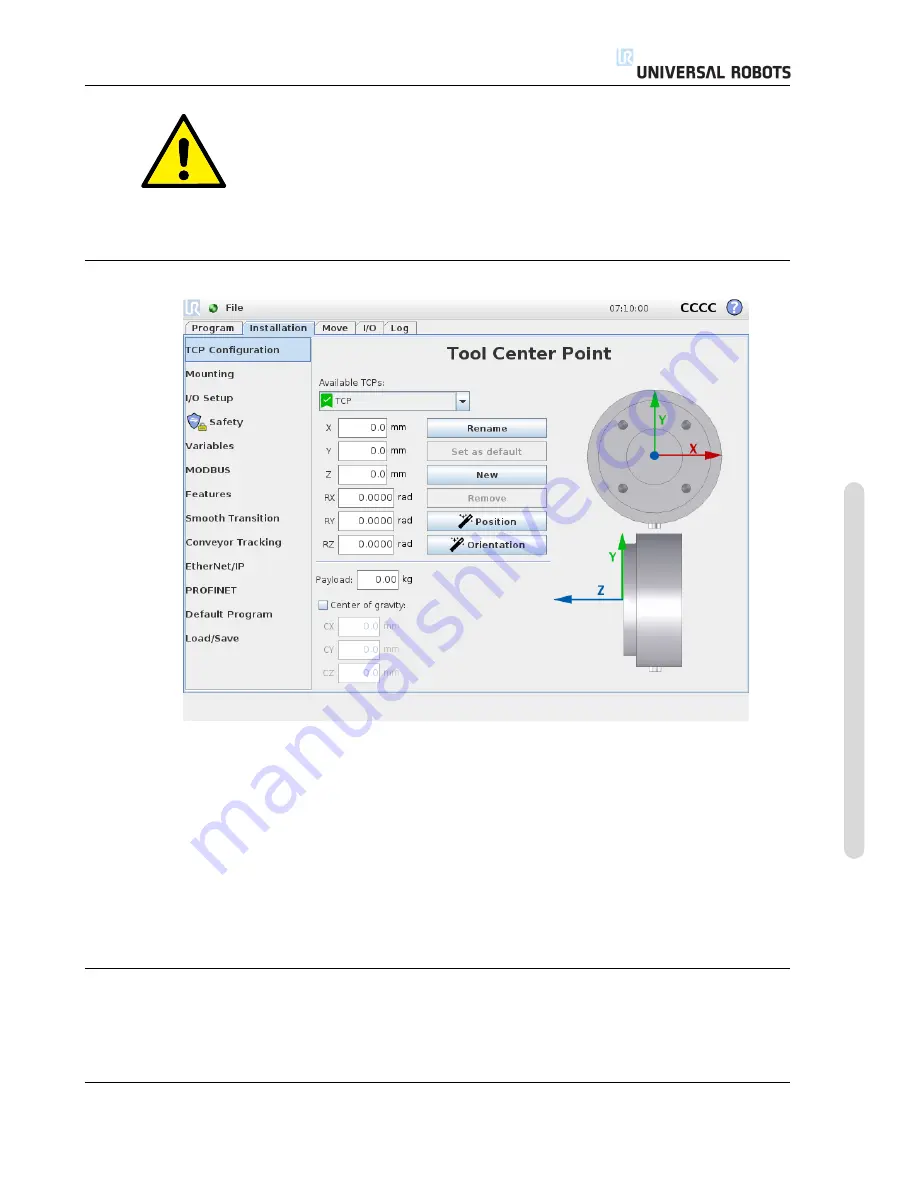
A
Tool Center Point
(TCP) is a point on the robot’s tool. The TCP is defined and named in the
Installation Tab
Setup for the Tool Center Point
screen (shown above). Each TCP contains a trans-
lation and a rotation relative to the center of the tool output flange.
When programmed to return to a previously stored waypoint, a robot moves the TCP to the po-
sition and orientation saved within the waypoint. When programmed for linear motion, the TCP
moves linearly.
The
X
,
Y
and
Z
coordinates specify the TCP position, while the
RX
,
RY
and
RZ
coordinates specify
its orientation. When all values are zero, the TCP coincides with the center point of the tool output
flange and adopts the coordinate system depicted on the screen.
13.6.1
Adding, renaming, modifying and removing TCPs
To define a new TCP, tap the
New
button. The created TCP automatically receives a unique name
and becomes selectable in the drop-down menu. To rename a TCP, tap the
Rename
button. To
remove the selected TCP, tap the
Remove
button. The last TCP cannot be removed.
Version 3.10
Cop
yr
ight
©
2009–2019
b
y
Univ
ersal
Robots
A/S
.
All
rights
reser
v
ed.
II-43
CB3
Содержание UR3/CB3
Страница 1: ...Universal Robots UR3 CB3 Original instructions en US version...
Страница 2: ......
Страница 3: ...Universal Robots UR3 CB3 Euromap67 Version 3 10 Original instructions en US Version...
Страница 12: ...UR3 CB3 x Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 15: ...Part I Hardware Installation Manual...
Страница 16: ......
Страница 36: ...UR3 CB3 I 22 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 42: ...4 4 Maximum Payload UR3 CB3 I 28 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 62: ...5 7 Robot connection UR3 CB3 I 48 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 66: ...UR3 CB3 I 52 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 90: ...UR3 CB3 I 76 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 92: ...UR3 CB3 I 78 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 94: ...E 1 Table 1 UR3 CB3 I 80 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 95: ...E 1 Table 1 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved I 81 UR3 CB3...
Страница 97: ...E 2 Table 2 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved I 83 UR3 CB3...
Страница 98: ...E 2 Table 2 UR3 CB3 I 84 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 99: ...Part II PolyScope Manual...
Страница 100: ......
Страница 122: ...10 13 Safety I O CB3 II 24 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 134: ...12 2 Pose Editor Screen CB3 II 36 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 166: ...13 18 Run Tab CB3 II 68 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 225: ...Part III EUROMAP 67 Interface...
Страница 226: ......
Страница 230: ...16 2 Statutory notice CB3 III 6 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 246: ...18 4 I O action and wait CB3 III 22 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 250: ...19 2 Uninstalling CB3 III 26 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...
Страница 254: ...20 4 Digital Outputs CB3 III 30 Version 3 10 Copyright 2009 2019 by Universal Robots A S All rights reserved...