





























Page 28
M4120170509EN
UI Robot Technology Co. Ltd.
UIM24102/04/08-IE
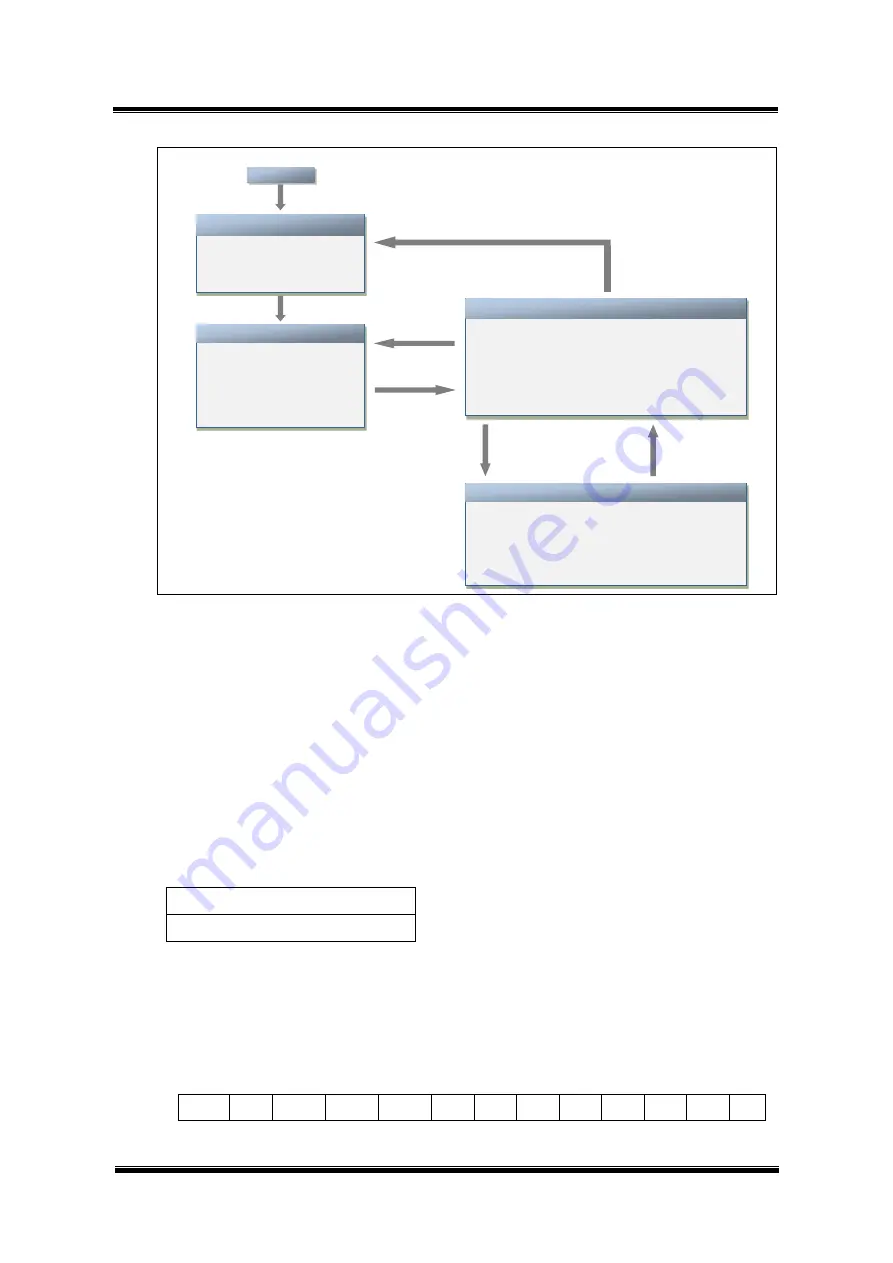
Figure6-3 Shifting between Motion Control Modes
6.2 Basic Instruction Acknowledgment (ACK)
Upon receiving an instruction, the UIM241XX controller will immediately send back an
Acknowledgment (ACK) message.
There are only two ACK messages for all of them, as
described below.
Error Message
If the received instruction is incorrect, UIM241 will issue an error message and the incorrect
instruction will not be executed.
EE [Error Code] FF
Where, EE denotes an error message.
The error code is list below:
Error Code
65
66
Meaning
Syntax Error Value Error
Basic ACK Message
When a valid instruction is received, the UIM241 will send back a basic ACK message. The
basic ACK message contains all desired settings. Specifically, following information is
included in the ACK message: STP, SPD, DIR, MCS, CUR, ENABLE/OFFLINE, and ACR.
The basic ACK message is 13bytes long and has a structure as shown below:
Byte
1
2
3
4
5
6
7
8
9
10
11
12
13
Value
AA
00
ASB
CUR
SPD2 SPD1 SPD0 STP4 STP3 STP2 STP1 STP0 FF
Where,
Power up
Instruction ENA;
1)
H-bridge disabled, logic
circuit working
2) can accept, buffer and
operate instructions
offline
1)
Approach
the
desired
speed
2)
Keep running at the desired
speed
3)
Set the desired speed at 0
to stop
VT Mode
1)
set the desired speed, and then set the desired
position (or displacement) successively or
discontinuously
2)
approach the desired speed while making sure the
desired position is achieved
3)
keep running at the desired speed
4)
stop after reaching the desired position
PT Mode
Instruction STP
;
Instruction QEC
;
Instruction STP 0;
1)
set the desired speed and position (or
displacement) successively or discontinuously
2)
approach the desired speed while making sure the
desired position is achieved
3)
keep running at the desired speed
4)
stop after reaching the desired position
PVT Mode
Instruction OFF;
{SPD
;QEC
;}
{SPD
;STP
;}
Instruction STP
;
Instruction QEC
;





















































