



























ZED-F9R - Application note
UBX-22035176 - R01
Contents
Page 17 of 30
C1-Public
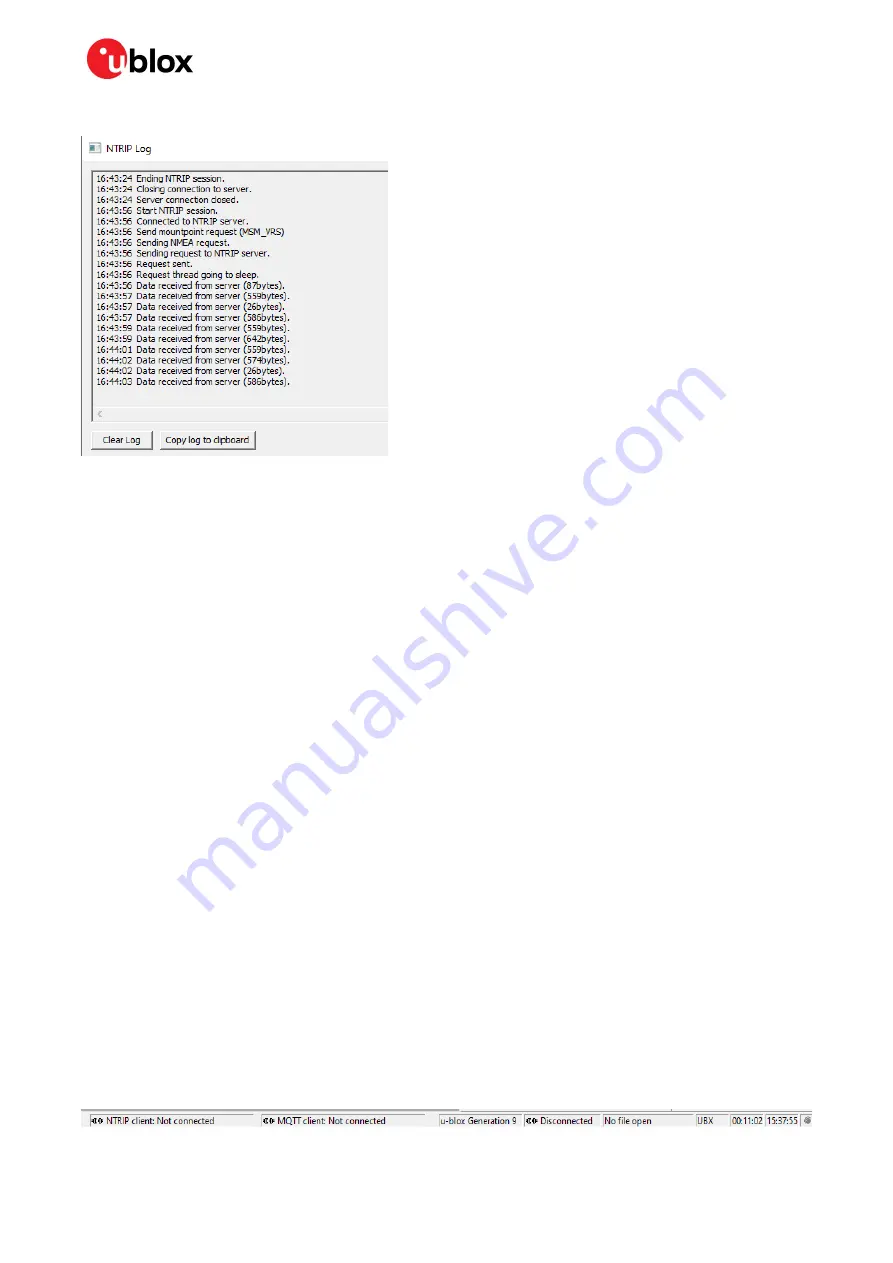
Figure 12: NTRIP client log
5.2
Setting up MQTT client in u-center
IoT devices and applications require a reliable, robust, and secure messaging protocol. That is where
MQTT comes in. MQTT is an OASIS standard messaging protocol for the Internet of Things (IoT). It is
designed as an extremely lightweight publish/subscribe messaging transport that is ideal for
connecting remote devices with a small code footprint and minimal network bandwidth. (Source:
PointPerfect is a high performance GNSS augmentation service that enables high accuracy with high
precision GNSS receivers. PointPerfect adopts the industry-driven SPARTN messaging format.
SPARTN is an industry-led format that enables the highly efficient transfer of GNSS correction data.
The service uses MQTT as the basic transport mechanism for the different elements of the service.
This includes authentication, ancillary services like AssistNow, service key delivery and the actual
service. u-center implements a MQTT client.
Start using the u-center MQTT client with the following steps:
1.
Open u-center and connect to the receiver via
Receiver > Connection.
2.
Open the MQTT client settings from
Receiver > MQTT Client.
3.
Download a u-center config file from the Thingstream portal associated with your device and
region of operation and add it as the “JSON config file”.
4.
Check the box to “Subscribe to key topic”.
5.
Check the box to “Subscribe to AssistNow topic”.
6.
Check the box to “Subscribe to data topic”.
7.
Select the data topic using the drop-down menu suitable for the region of operation.
8.
Press
OK
to start the MQTT client.
For more information on the PointPerfect service, please refer to:
PointPerfect getting started guide
The status bar at the bottom of the u-center window provides information on the status of the service
for monitoring and debugging purposes. When the authentication is successful and the service is
connected, the connection symbol turns green.
Figure 13: Bottom Status bar of u-center