




















ZED-F9P - Integration Manual
UBX-18010802 - R01
1 Overview
Page 6 of 64
Objective Specification - Confidential
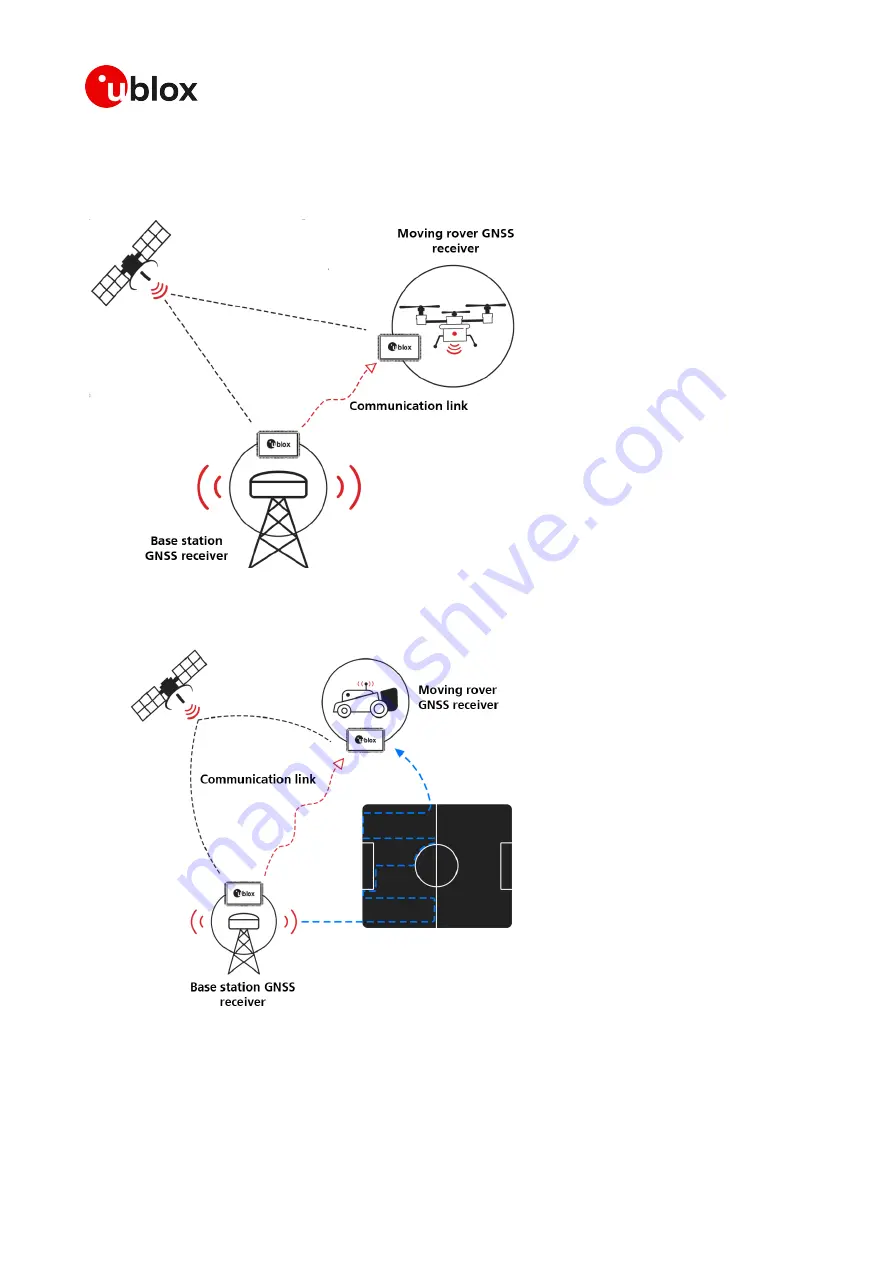
1.2 Typical ZED-F9P application setups
1.2.1 ZED-F9P in a drone application
Figure 2: ZED-F9P base and rover in a short baseline drone application
1.2.2 ZED-F9P in a robotic mower application
Figure 3: ZED-F9P base and rover in a short baseline robotic mower application
1.3 Default GNSS configuration
The default GNSS configuration is:
• GPS L1C/A L2C







































































