





























58
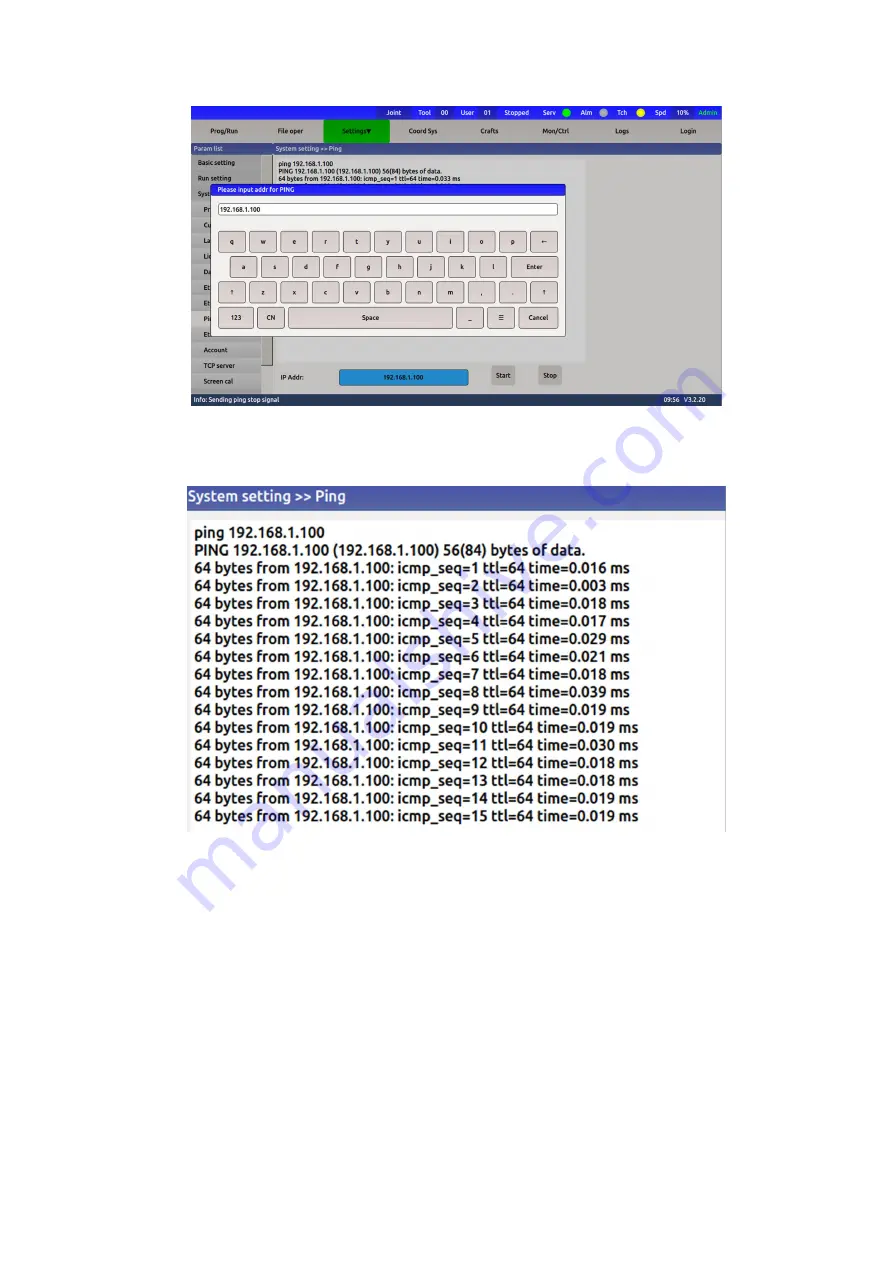
Figure 4-18 Communication test
The IP address is set as the destination IP address.
Click Start, and the interface shown below is displayed, indicating that the two parties
have successfully connected.
Figure 4-19 Successful connection interface
4.5 Remote browsing and remote commands
4.5.1 Remote interface operation
If the user needs not to use the teaching pendant, the robot interface can be accessed
through the host computer browser. At this time, the functions of enabling, emergency stop,
switching teaching/reproduction, etc. need to be operated by buttons on the cabinet. For
detailed instructions, please refer to the "Debugging Manual" document.
4.5.2 Remote command
If the user needs to control the robot through the host computer, then remote
command is a good choice. First set the IP of the robot, set the IP of the host computer to
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...







































































