





























52
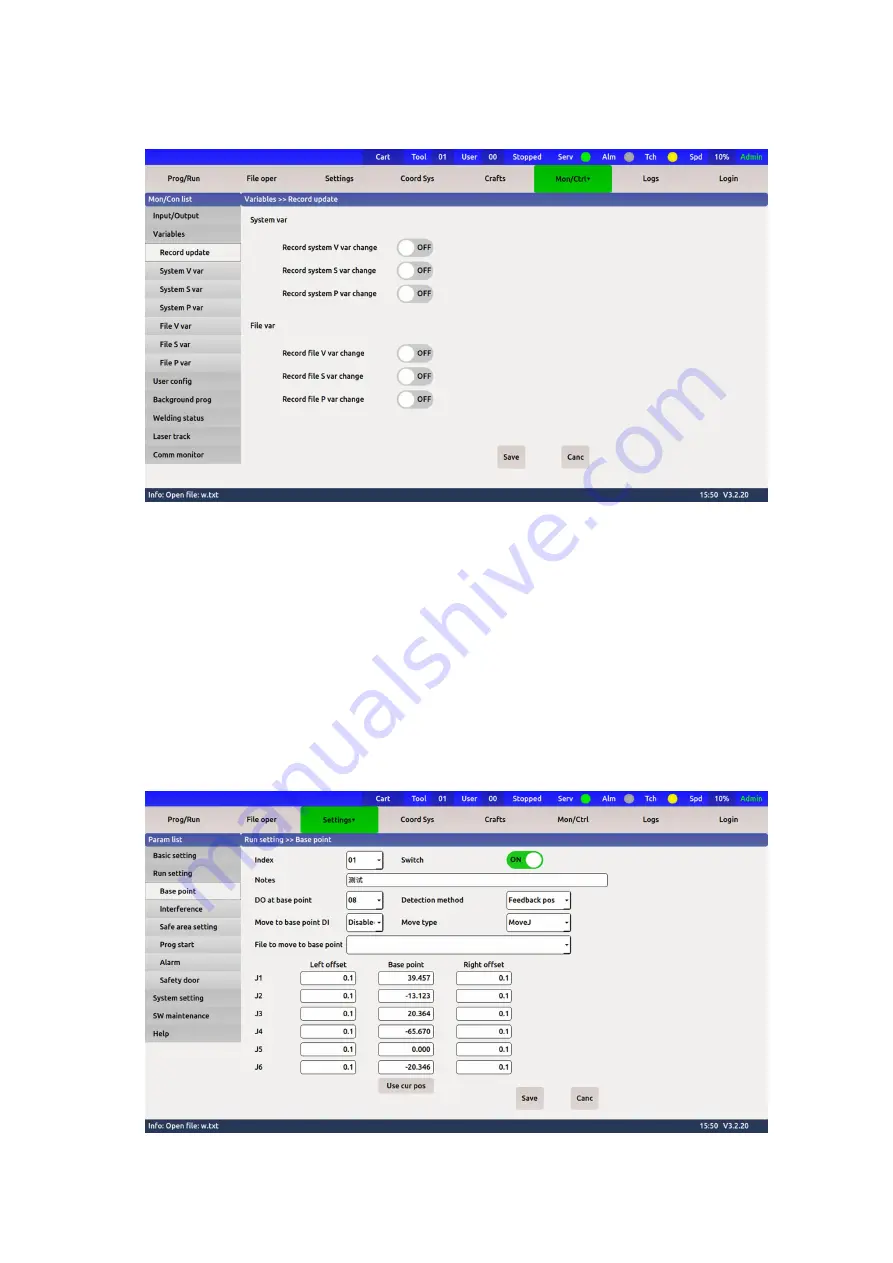
4.2.3 Variable automatic storage
Figure 4-7 Automatically storing variables
When the corresponding variable is automatically stored as on, the system always
monitors the variable that has been used in the script, and when its value changes, it will be
immediately stored in the file. In order to use the changed value the next time the script is
started.
Note: Because the current hardware system does not have power-off protection
measures, when the program is running, abnormal power-off behavior (such as screwing
the power supply) may cause the value that has just been changed to fail to be stored in the
file. This point requires special attention.
4.3 Run settings
4.3.1 Reference position setting
Figure 4-8 Reference position setting
Содержание TKB80306
Страница 1: ...Shanghai Turing Intelligent Manufacturing Robot Co LTD ...
Страница 6: ...IV IV 8 2 Common faults and treatment 82 ...
Страница 52: ...46 Figure 3 49 Sorting files ...
Страница 56: ...50 Figure 4 4 System V variables Figure 4 5 System S variables ...
Страница 79: ...73 Figure 6 8 Log print settings ...





















































