





























TMCM-1311 TMCL Firmware V1.11 Manual (Rev. 1.17 / 2015-NOV-05)
82
www.trinamic.com
8.3
Setting Encoder Resolution and Motor Resolution
Before starting closed loop operation, the resolution of the encoder and the motor must be configured
properly. Therefore, set just two parameters: encoder resolution (axis parameter 210) and motor resolution
(axis parameter 202).
E
NCODER
R
ESOLUTION
Encoders that have a binary resolution (e.g. 32768 steps per round) can be used as well as encoders with a
decimal resolution (e.g. 40000 steps per round). To configure the resolution of the encoder use parameter
210 and input the encoder resolution directly. For a typical ABN type quadrature encoder, the resolution in
number of positions or increments is the number of lines 4 times. E.g., if you have a 1000 lines encoder, the
resolution is 1000 * 4 = 4000.
Note: SSI encoder interface is not yet implemented.
M
OTOR
R
ESOLUTION
For proper operation especially in closed loop mode, the motor resolution must also be configured. The
default value is 200 as most stepper motors have 200 fullsteps with 1.8° each. If your motor is different, you
need to adapt parameter 202 by simply configuring the number of fullsteps of the motor.
A
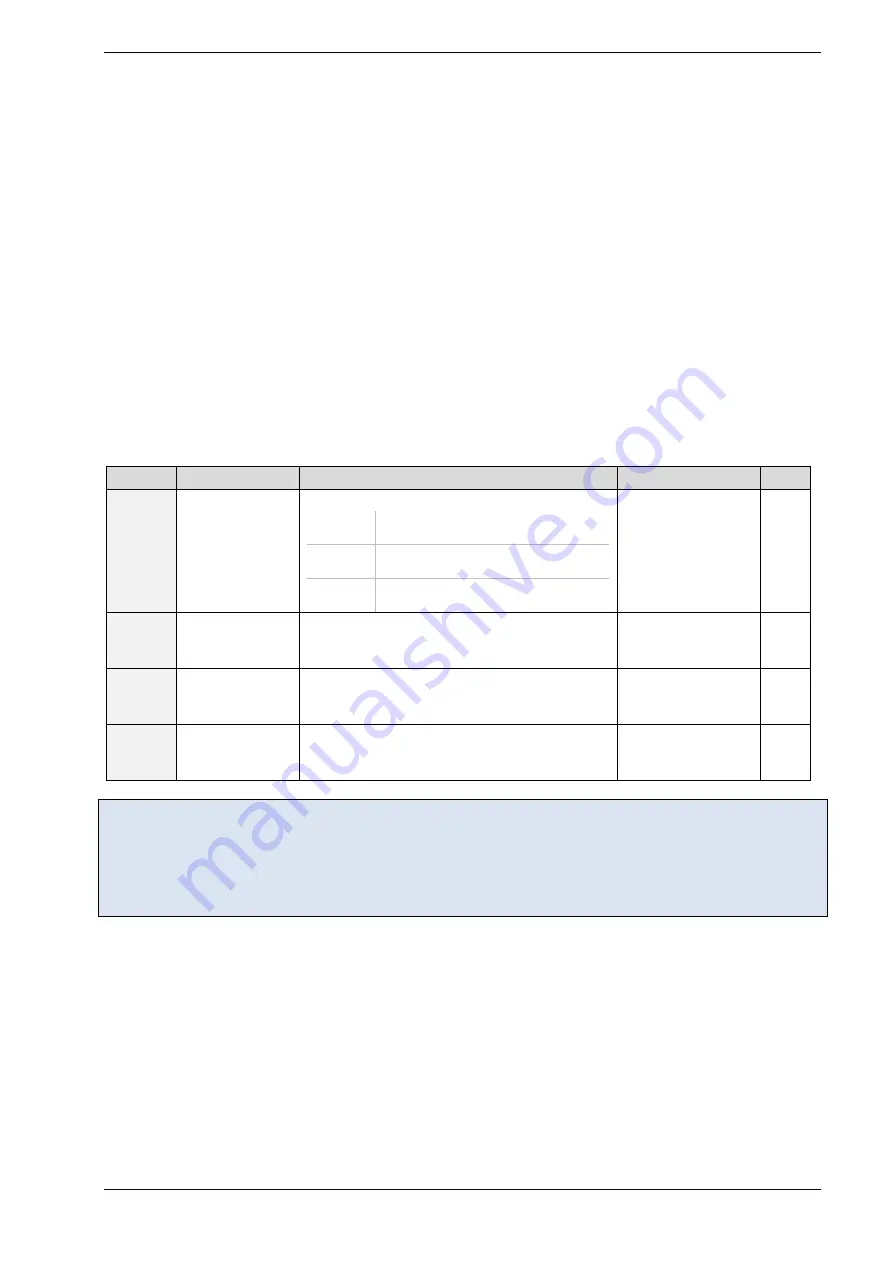
XIS PARAMETERS RELATED TO ENCODER RESOLUTION AND MOTOR RESOLUTION
Number Axis parameter Description
Units / Default
Acc.
201
Encoder mode
Operation mode of the encoder.
4 (bit 2)
Clear encoder on next null channel
event.
8 (bit 3)
Clear encoder on every null channel
event.
16 (bit 4) Null channel polarity (active high
when set)
4, 8, 16
RWE
202
Motor
Resolution
Motor fullstep resolution.
0… 400
Default: 200
[fullsteps]
RW
210
Encoder
resolution
Resolution of the encoder in absolute
positions.
Quadrature encoder: 1 line = 4 positions
0… 65535
[positions]
RW
112
CL Encoder
Offset
Offset between encoder and electrical angle
for correction of possible misalignment.
0
default
[encoder steps]
RW
A
TTENTION
!
The encoder for a stepper motor with, e.g., 200 fullsteps per rotation should have a minimum encoder
resolution of 9 bit in order to have adequate supporting points per fullstep. This is necessary to avoid step
loss in case a fullstep change happens.
Minimum encoder resolution > fullsteps of stepper motor *2