





























EtherCAT Information
TR-Electronic GmbH 2016, All Rights Reserved
Printed in the Federal Republic of Germany
Page 20 of 153
TR-EMO-BA-GB-0022 v03
09/29/2020
4.2 Protocol
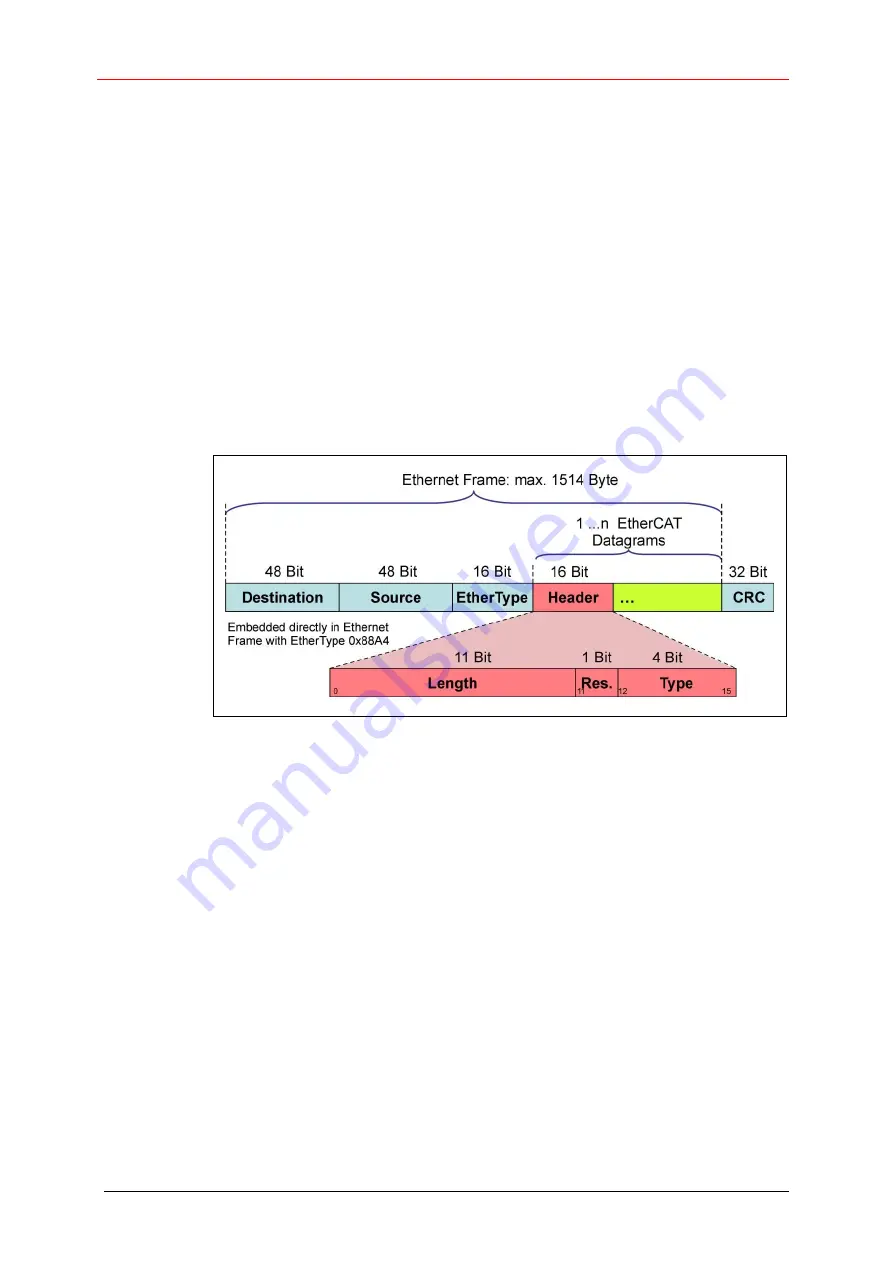
The EtherCAT protocol, optimized for process data, is transported directly in the
Ethernet frame via a special Ether type. A complete transmission can consist of
several sub-frames. The data sequence is independent of the physical sequence of
the slaves in the network. The addressing can be freely selected:
Broadcast, Multicast and lateral communication between slaves are possible.
The protocol also supports acyclical parameter communication. The structure and
meaning of the parameters is predetermined by the device profile
"CANopen Device
Profile Drives and Motion Control CiA DSP-402"
.
UDP/IP datagrams are not supported. This means that the master and the EtherCAT
slaves must be located in the same subnet. Communication across routers into other
subnets is thus not possible.
EtherCAT exclusively uses standard frames in accordance with IEEE802.3 without
shortening. EtherCAT frames can thus be sent by any Ethernet controllers (master),
and standard tools (e.g. monitor) can be used.
Figure 2: Ethernet frame structure





















































