





























TPM
EasyPAC User Manual
143
6.6.5. Motion Function Block List
Name Rule
FB’s with MC_ prefix are developed according to the PLCopen standard. FB’s with SA_, GA_ or EP_ prefix
are developed by TPM.
Execution Logic
The execution can be activated either by rising-edge or falling-edge and the data type is BOOL. In the case of
rising-edge Execute will be used as the parameter. In the case of level-trigger Enable is used as the parameter.
When level is HIGH, it will be executed repeatedly until the level becomes LOW.
Status Logic
The standard output includes Valid, Done, Busy, Active, CommandAborted, Error and ErrorID. The
corresponding data type is BOOL except that ErrorID is INT.
Valid represents that FB is executable, R/W of parameter is successful when Valid is TRUE and is failed when
Valid is FALSE. “Done” represents that FB is executed. Busy and Active represent that FB is being executed.
CommandAborted represents that FB is interrupted while being executed and is aborted therefore. Error
represents that the execution of FB is not correct. ErrorID can be used to check. Valid/Done, Busy/ Active,
CommandAborted and Error are mutually incompatible. When “Error” is TRUE, ErrorID is not 0.
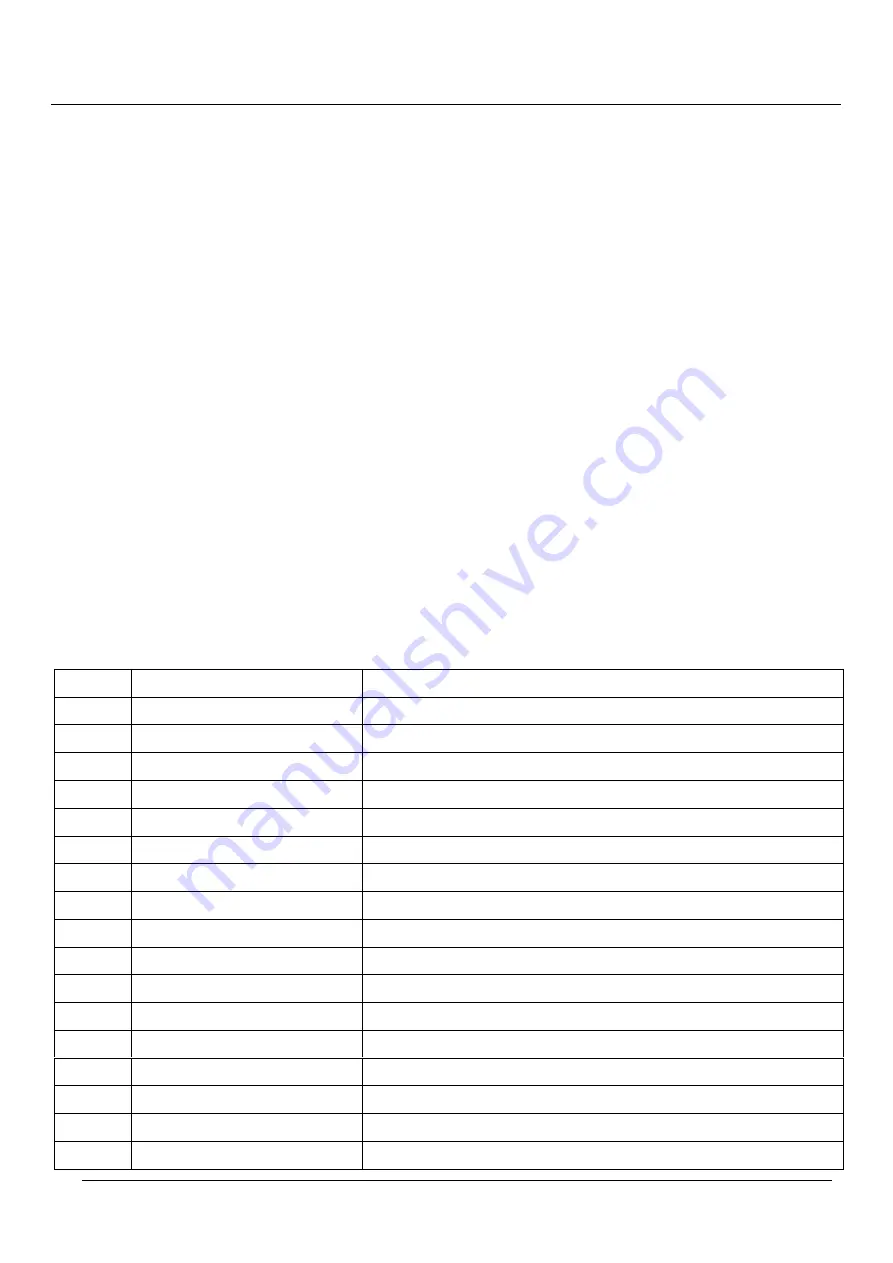
The available Motion FB of EasyPAC is listed in the following table:
Index
Motion FB Name
Description
GA_GroupDisable
Disable the grouped motion function
GA_GroupEnable
Enable the grouped motion function
GA_GroupReset
Reset grouped axes to Standstill
GA_GroupStop
Grouped axes stop
GA_MoveCircularAbsolute
Grouped absolute circular motion with T or S curve
GA_MoveCircularRelative
Grouped relative circular motion with T or S curve
GA_MoveLinearAbsolute
Grouped absolute linear motion with T or S curve
GA_MoveLinearRelative
Grouped relative linear motion with T or S curve
GA_MovePath
Continuous motion with multiple segments
6.6.5.10 GA_PathSelect
Select and download the continuous path from xxxx.kwpts
6.6.5.11 MC_Home
Do homing of the axis
6.6.5.12 MC_MoveAbsolute
Absolute move with T or S curve
6.6.5.13 MC_MoveRelative
Relative Move with T or S curve
6.6.5.14 MC_MoveVelocity
Velocity Move with T or S curve
6.6.5.15 MC_Power
Enable Servo/Step Driver for IP1~IP32 (AXIS_01~AXIS_32)
6.6.5.16 MC_ReadActualPosition
Get the axis actual position from encoder
6.6.5.17 MC_ReadAcutalVelocity
Read the current actual velocity
Содержание EasyPAC
Страница 29: ...TPM EasyPAC User Manual 29 4 4 Motionnet Product Family Figure 4 4 EasyPAC and Motionnet product family ...
Страница 62: ...TPM EasyPAC User Manual 62 1 48 IP x 4 Port x 1 Byte 16 IP x 8 Channel x 2 Byte 1 192 256 449 Byte ...
Страница 74: ...TPM EasyPAC User Manual 74 ...
Страница 75: ...TPM EasyPAC User Manual 75 ...
Страница 76: ...TPM EasyPAC User Manual 76 ...
Страница 77: ...TPM EasyPAC User Manual 77 ...
Страница 78: ...TPM EasyPAC User Manual 78 ...
Страница 79: ...TPM EasyPAC User Manual 79 ...
Страница 80: ...TPM EasyPAC User Manual 80 ...
Страница 81: ...TPM EasyPAC User Manual 81 ...
Страница 82: ...TPM EasyPAC User Manual 82 ...
Страница 83: ...TPM EasyPAC User Manual 83 ...
Страница 84: ...TPM EasyPAC User Manual 84 ...
Страница 85: ...TPM EasyPAC User Manual 85 ...
Страница 86: ...TPM EasyPAC User Manual 86 ...
Страница 87: ...TPM EasyPAC User Manual 87 ...
Страница 88: ...TPM EasyPAC User Manual 88 ...
Страница 89: ...TPM EasyPAC User Manual 89 ...
Страница 90: ...TPM EasyPAC User Manual 90 ...
Страница 91: ...TPM EasyPAC User Manual 91 ...
Страница 92: ...TPM EasyPAC User Manual 92 ...
Страница 93: ...TPM EasyPAC User Manual 93 ...
Страница 94: ...TPM EasyPAC User Manual 94 ...
Страница 107: ...TPM EasyPAC User Manual 107 6 2 3 Compile Click on the Make button to compile the project Figure 6 21 making a project ...
Страница 133: ...TPM EasyPAC User Manual 133 ...
Страница 140: ...TPM EasyPAC User Manual 140 Standard behavior of 2 following absolute movements ...
Страница 141: ...TPM EasyPAC User Manual 141 ...
Страница 209: ...TPM EasyPAC User Manual 209 Figure 6 104 axis status with Stop signal turned on ...