















GUI Application
6
SLOU536 – June 2020
Copyright © 2020, Texas Instruments Incorporated
DRV8428EVM GUI User's Guide
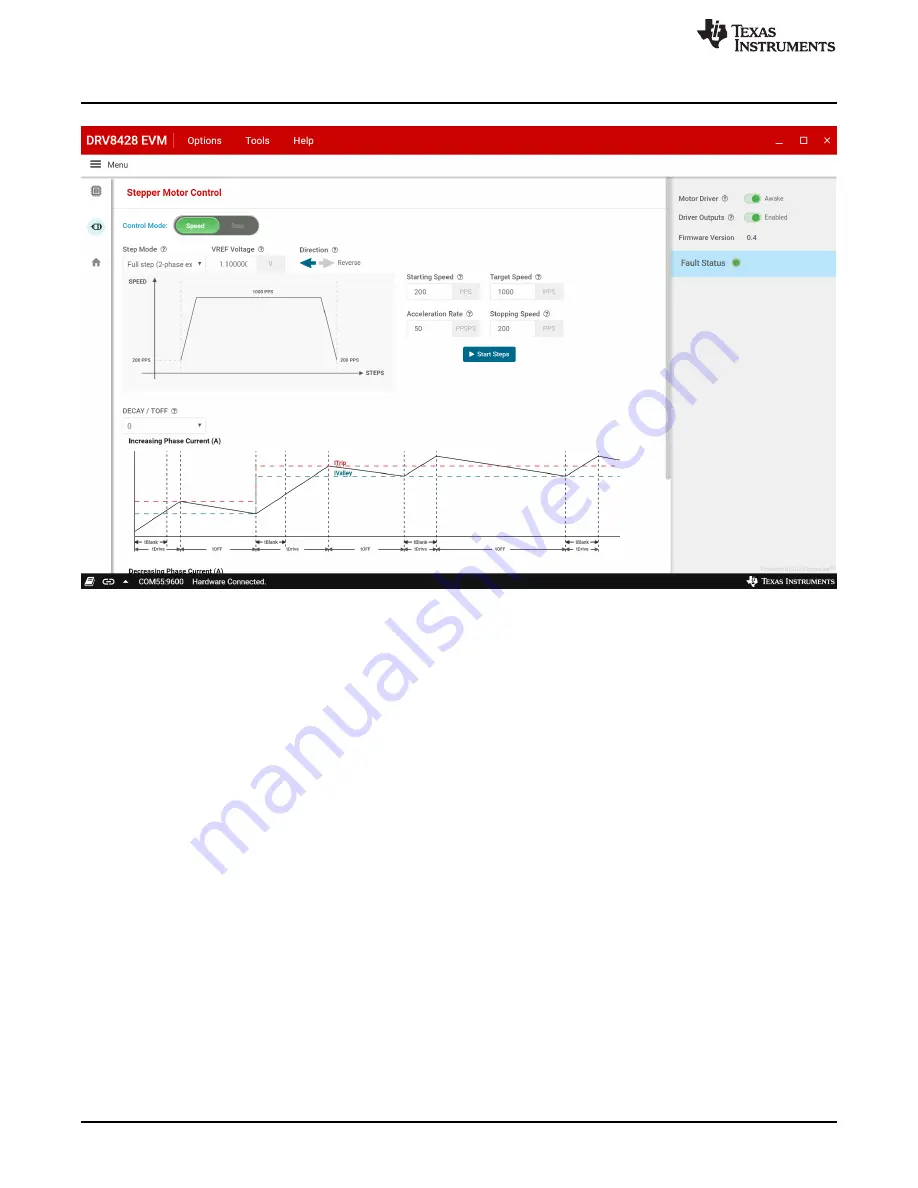
Figure 5. DRV8428 EVM GUI (Stepper Motor Control Page)
3.3.1.1
Stepper Control Modes
The GUI allows the user to control the stepper motion profile in two modes – Speed Mode and Step Mode.
To toggle between the modes, use the toggle button at the top of the screen.
3.3.1.1.1
Speed Mode
Speed Mode allows the user to spin the stepper motor continuously at a desired speed. The user
configures the starting speed, stopping speed, acceleration rate, and target speed. Stepper controls are
enabled only when ‘Motor Driver' control is enabled. ‘Start Steps’ button is enabled only when ‘Driver
Outputs' control is enabled for example, EN/nFault pin is set to high. When the ‘Start Steps’ button is
clicked, the motor begins spinning at the starting speed and accelerates to the target speed according to
the configured acceleration rate. The acceleration profile in the microcontroller firmware accepts the
starting-speed PPS signal and target-speed PPS signal as a clock cycle number.
When the ‘Start steps’ button is clicked, the PWM timer generates steps at a rate specified by the 'Starting
Speed' PPS parameter. When ‘Stop Steps’ is clicked, the motor starts decelerating at the ‘Acceleration
Rate’ configured to reach the stopping speed and eventually stop. The configuration is visualized by the
embedded graph shown on the GUI screen.
When accelerating or decelerating, the PPS signal is adjusted every 32 ms based on the integer value of
PPSPS / 32 ms. Acceleration rates must be between 1 and 65,535 PPSPS. The step rate increases by
the calculated value until the target speed is reached.
The starting speed must be less than or equal to the target speed. If the starting speed and target speed
are equal, the EVM firmware will not perform an acceleration routine. The stopping speed must also be
less than or equal to the target speed. The target speed is limited to a range between 200 and 65,535
PPS.