











Hardware Connections
1. Connect one end of the Powerpole extension cable to the other battery
connection port on PRIZM. Connect the other end of the Powerpole
extension cable to the battery connection port on the Tele-Op module.
2. Connect one end of the daisy-chain data cable to the I2C expansion
port on PRIZM. Connect the other end of the daisy-chain data cable to
the I2C port on the Tele-Op module.
3. Choose a location on the TaskBot to attach the Tele-Op module.
Make sure that the location is close enough to PRIZM that the power
connection cable and the daisy-chain data cable will reach between the
Tele-Op module and PRIZM. Attach the Tele-Op module using leftover
socket head cap screws and kep nuts from your TETRIX MAX set.
4. This activity uses the motor encoders built into the TETRIX MAX
TorqueNADO® Motors. Connect one end of a motor encoder cable to a
TorqueNADO motor. Connect the other end of the cable to the encoder
port on PRIZM that corresponds to the motor port for that motor
(Motor 1 to Encoder Port 1, Motor 2 to Encoder Port 2).
5. Make sure that the Ultrasonic Sensor on the TaskBot is connected to
Port D2 on PRIZM.
6. Make sure that the Line Finder Sensor is connected to Port D3 on
PRIZM.
7. Make sure that the servo that raises and lowers the flag on the TaskBot
is connected to Servo Port 1 on PRIZM.
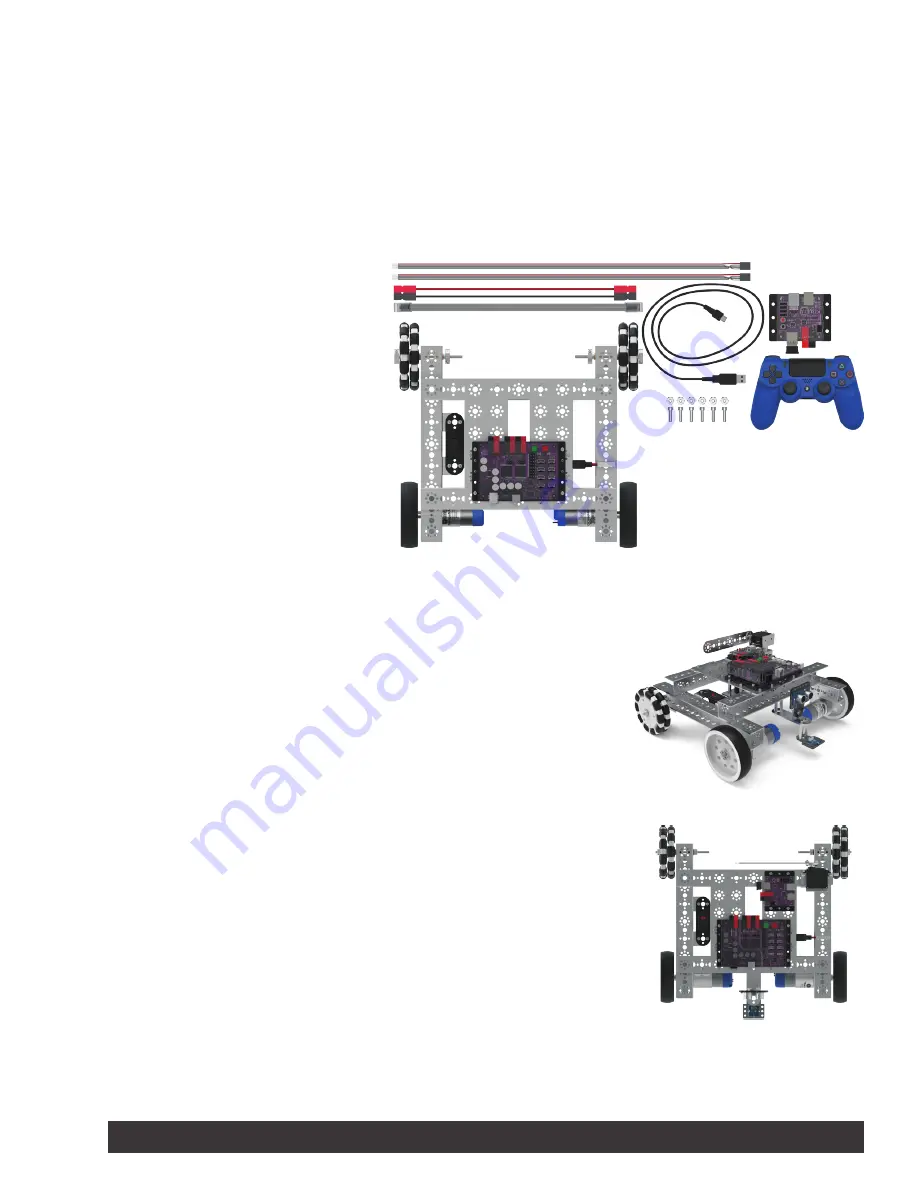
Tele-Op Module Activity 2 – TaskBot Control
Parts Needed
• Built TETRIX® MAX TaskBot from
PRIZM
Programming Guide
• Tele-Op module
• PS4 DUALSHOCK 4 gaming controller
• Powerpole extension cable
• Daisy-chain data cable
• 2 motor encoder cables
• USB cable
• Socket head cap screws
• Kep nuts
Overview
In this activity, you will understand how the Tele-Op module enables you to control
a robot using the buttons, triggers, joysticks, and sensors associated with the PS4
DUALSHOCK 4 gaming controller. You will first need to build the TaskBot using
instructions from the
PRIZM
®
Programming Guide
. The TaskBot should include
the PRIZM controller, the Line Finder and Ultrasonic Sensors, and the servo/flag
attachment that is used for the final activity in the
PRIZM Programming Guide
.
TETRIX Tele-Op Control Module Activity 2
1