


























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
2 9
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
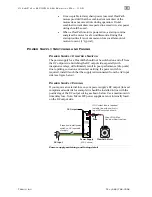
In this particular mode, ClearPath must perform a homing operation (all
of the target positions are defined in terms of distance from the "home"
reference position). Setting up your homing parameters is easy, and only
has to be done once (using the included MSP software).
After homing is complete,
ClearPath can be commanded to move to any of
the four target positions by changing the state of Inputs A and B.
E
XAMPLE
:
M
AKING A
M
OVE
Motion objective:
Move the load platform from position#1 to position
#4.
User action:
Simultaneously set Inputs A and B high. This can be done
with toggle switches, PLC, microcontroller, or other compatible device.
Motion result:
The motor immediately begins a move based on the
user’s acceleration and velocity settings. The motor then decelerates and
settles at position #4. Note: ClearPath will actively servo to maintain
position until another move command is received, unless the system is
intentionally disabled, powered down, or in a shutdown state.
The Digital Output
(we call it HLFB, for High-Level Feedback) can be
configured to signal when ClearPath completes a move, reaches a
specified speed or torque, or shuts itself down for safety reasons. See the
section on Outputs (High-Level Feedback) for more on HLFB modes.
O
VERVIEW
:
C
ONFIGURING A
C
LEAR
P
ATH
ClearPath must be configured and tuned before it can be used
in a motion application.
The main configuration steps are outlined
below. Each of these points is discussed in greater detail later.
1.
Install ClearPath software (MSP) on a qualified Windows PC.
2.
Connect your I/O devices to ClearPath (switches, PLC,
microcontroller, etc.).
3.
Supply DC power (24-75VDC) to ClearPath.
4.
Connect ClearPath to your PC with a standard USB cable.
5.
Use ClearPath MSP software to:
a.
Select a mode of operation.
b.
Set motion parameters and options (acceleration,
velocity, torque, safety settings, etc.).
c.
Tune the motor to the mechanical system.
6.
Test and adjust settings as needed to optimize quality of
motion and overall system performance.
7.
Disconnect the computer. Cover USB port with the included
silicone plug, and run your application. No computer is
needed once setup is complete.
Save your settings!
You can save your ClearPath settings to a motor
configuration file—the file extension is .mtr—at any time. This allows you
to easily test and compare various sets of tuning parameters. And, if you
build many machines of the same design, you’ll appreciate how quickly
you can load a saved configuration file into a new ClearPath.