





























C
L E A R
P
A T H
M C / S D
U
S E R
M
A N U A L
R
E V
.
3 . 0 9
1 0 7
T
EKNIC
,
I
NC
. T
EL
.
(585)
784-7454
F
OLLOW
D
IGITAL
V
ELOCITY
C
OMMAND
(B
I
-P
OLAR
PWM
C
OMMAND
WITH
I
NHIBIT
)
M
ODE
D
ESCRIPTION
Connect a digital PWM waveform from your PLC or other device, and
ClearPath will run at a velocity proportional to the duty cycle of that
waveform. Or, use the PWM output from an H-bridge driver of a brushed
motor setup and ClearPath becomes a high-performance drop-in
replacement.
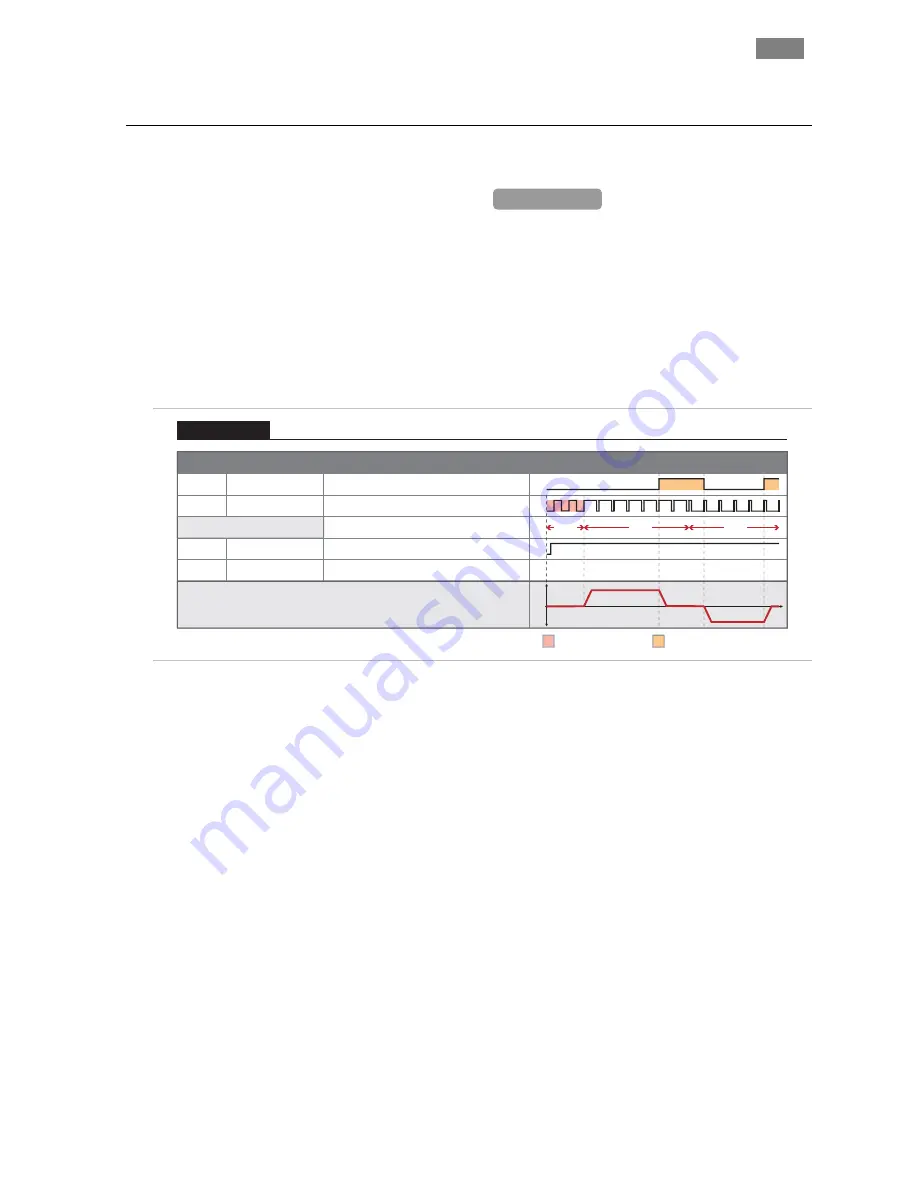
Assert the Enable Input to energize the motor. Control motor speed and
direction by modulating the duty cycle of the PWM signal. Assert the
Inhibit signal (Input A) to immediately ramp to zero velocity. See figure
below and read text for timing and PWM requirements.
Signal
Function
Input Type
Input A
Motor velocity vs. time
Input B
Enable
Inhibit (optional)
Speed/Direction
Enable
NA
NA
Trigger
Logic: High=Inhibit on Low=Inhibit off
Pulse: Variable PWM
Logic: High=Enable Low=Disable
0
1
0
1
t
v
Example Timing
Notes:
Asserting Inhibit Input causes immediate ramp to zero speed. See text for
information on deadband set up and application.
0
1
0
1
Inside deadband
Inhibit on
Duty cycle of applied PWM signal (%)
Follow Digital Velocity Command (Bi-Polar PWM Command)
Velocity Control
90%
50%
10%
I/O
F
UNCTIONS
Enable Input -
Asserting this input energizes the motor shaft.
Input A -
This input forces the speed to zero regardless of the input PWM
duty cycle.
Input B -
This input is connected to a PWM signal whose duty cycle
represents the desired velocity.
Output (HLFB) -
See HLFB section for available modes.
Notes:
•
PWM input frequency range: 20 Hz up to 30 kHz.
•
The output of a standard H-bridge driver for a DC brush motor
is bipolar PWM, so it can be used to allow ClearPath to replace a
DC brush motor without changing anything else in the system.
•
A 50% PWM duty cycle means zero speed; near 100% and near
0% duty cycle correspond to opposite directions at the user-
defined maximum speed.
•
Input A can be used to command zero speed at any time
(overriding the PWM). Or, if duty cycle drift is preventing the
MCVC + MCPV
Available on







































































