



























Technosoft 2021
26
iPOS360x HX-CAN Technical Reference
3.5.8.3
Digital Hall Connection for Motor + Hall + Incremental Encoder
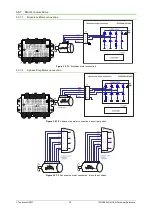
Figure 3.5.8.3
Digital Hall conn Incremental Encoder
Remarks:
1. This connection is required when using Hall start method BLDC or PMSM and also for the Trapezoidal
commutation method.
2. The length of the cables must be up to 30m, reducing the exposure to voltage surges in industrial environment.
3.5.8.4
Digital Hall Connection for direct motor control without an encoder (only with P028.00x.E561)
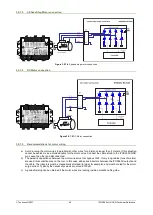
Figure 3.5.8.4
Digital Hall connection
Remarks:
1. This connection is required when using only Digital hall signals as the main feedback device for motor control.
In this case, no incremental encoder is needed.
2. Do not connect unterminated wires. They might pick up unwanted noise and give false encoder readings.
3. The length of the cables must be up to 30m, reducing the exposure to voltage surges in industrial environment.
4. For this type of motor control use firmware F523/F524 instead of F518x/F519x.