





























3.1.9.1.50 0x2012 Position controller
3.1.9.1.50.1 Parameter Tuning Guide for Position Controller with Cascaded Structure
3.1.9.1.50.1.1 Introduction
The cascaded control structure is the standard position control structure for SOMANET Drives. Its controller
gains can be automatically set by the auto-tuning process, the results will be stored in the objects 2012:1 ...
2012:8. If auto-tuning is not applicable or manual modifications are necessary, the gains can be set manually.
In the following, a procedure to do so is described. If a simple PID position controller is selected instead of
the cascaded PID position controller, its gains are defined by the objects 2012:1 ... 2012:4.
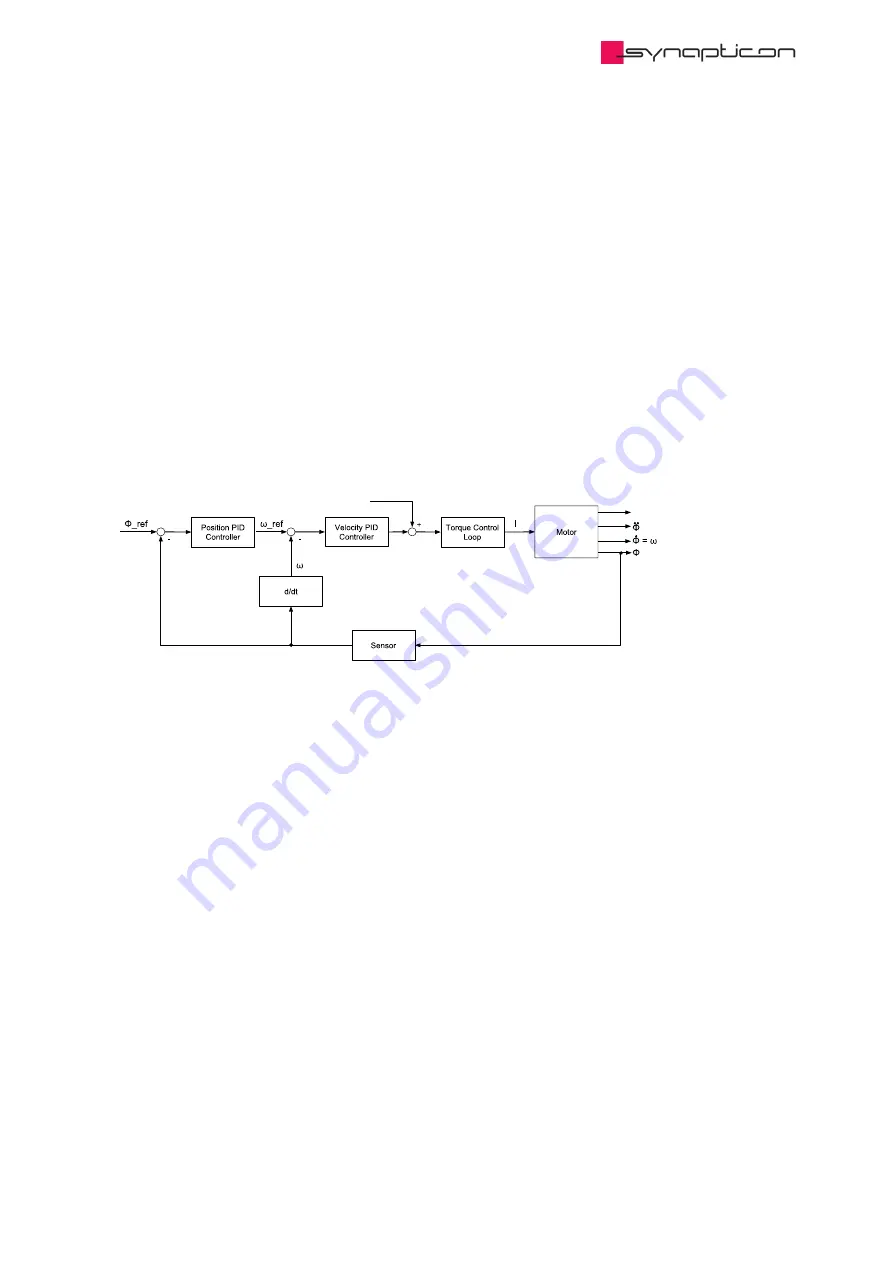
3.1.9.1.50.1.2 Control Basics
τ_offset
τ_ref
τ
3.1.9.1.50.1.3 Control Basics
Cascaded controller is usually used in PI-P form, i.e. inner loop (velocity control loop) is only using the
proportional part of its PID controller and the outer loop (position controlling loop) is only using its
proportional and integral part. The other form is P-PI form, i.e. inner loop is using proportional and integral
part and outer loop uses only proportional part. The inner velocity control loop is responsible for calculating
the torque reference. As a result the integral limit of the velocity controller should be set to the maximum
torque of your torque actuato. Moreover, the outer position control loop is responsible for controlling the
reference velocity, and consequently its integral limit should be set to the maximum velocity of your system.
Synapticon Documentation
© 2021 Synapticon GmbH | Daimlerstraße 26 | D-71101 Schönaich Documentation v 4.19.0 | Built 2022-02-01
782/1031







































































