





























- 31 -
CLRS Series RS485 Closed Loop Stepper Drive User Manual
PR Path
Select the PR path number by 4 digital inputs (ADD0, ADD1, ADD2, ADD3), and then start the
PR path movement by external I/O (CTRG) or RS485communication.
Include PP mode, PV mode and HM mode
Trigger methods include:
double edge trigger (CTGR) or
RS485 trigger
Support up to 16-segment PR positioning path
Position, velocity and Acc/Dec values can be set
Pause time or timing time can be set
Support interrupt, Overlapping, jump, etc.
Path Trigger
The above PR functions can be controlled by RS485
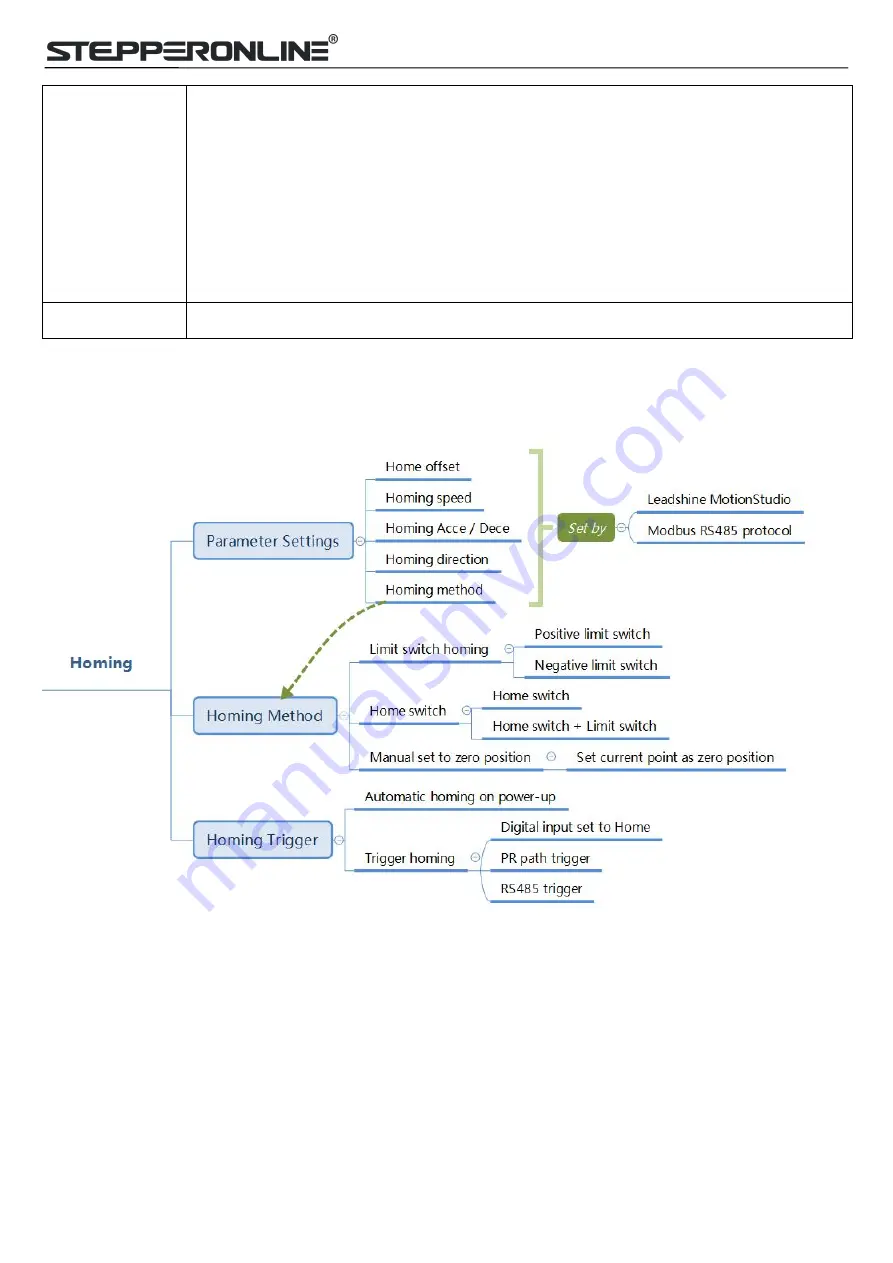
5.2 Homing / Return to Zero Position
Homing includes homing by detecting limit switch signal, homing by detecting home switch signal, set zero
position by manual, auto homing after powering on.
Zero Position: a fixed position on the machine can correspond to a definite digital input signal, or to a Z signal
Zero Point of Machine: mechanical absolute zero position
Home offset: difference between zero position and zero point of machine, the value of Object 607Ch (default =
0), Zero position= zero point + home offset
Home Switch: homing switch input signal
Negative Limit: negative limit switch input signal
Positive Limit: positive limit switch input signal
Trigger method of homing:
Automatic homing on power-up: After the drive is powered on, the motor will automatically search the zero
position.
Trigger to homing: when IO port set to Home function triggered by external level, or trigger via Modbus RS485.
Homing method:







































































