




























Operation
6.8 Communication via PROFIBUS DP
Converter cabinet units
346
Operating Instructions, 07/2016, A5E03347396A
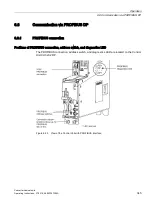
PROFIBUS connection
The PROFIBUS is connected by means of a 9-pin SUB D socket (X126). The connections
are electrically isolated.
Table 6- 27 X126 - PROFIBUS connection
Pin
Signal name
Meaning
Range
1
SHIELD
Ground connection
2
M24_SERV
Power supply for teleservice, ground
0 V
3
RxD/TxD-P
Receive / transmit data P (B/B')
RS485
4
CNTR-P
Control signal
TTL
5
DGND
PROFIBUS data reference potential (C/C')
6
VP
Supply voltage plus
5 V ± 10%
7
P24_SERV
Power supply for teleservice P, + (24 V)
24 V (20.4 ... 28.8 V)
8
RxD/TxD-N
Receive / transmit data N (A/A')
RS485
9
-
Not assigned
Connectors
The cables must be connected via PROFIBUS connectors as they contain the necessary
terminating resistors.
The figure below shows suitable PROFIBUS connectors with/without a PG/PC connector.
PROFIBUS connector
without PG/PC connection
6ES7972-0BA42-0XA0
PROFIBUS connector
with PG/PC connection
6ES7972-0BB42-0XA0
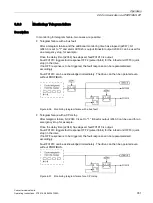
Bus terminating resistor
The bus terminating resistor must be switched on or off depending on its position in the bus,
otherwise the data will not be transmitted properly.
The terminating resistors for the first and last nodes in a line must be switched on; the
resistors must be switched off at all other connectors.
Содержание SINAMICS G150
Страница 1: ......
Страница 2: ......
Страница 8: ...Foreword Converter cabinet units 8 Operating Instructions 07 2016 A5E03347396A ...
Страница 18: ...Table of contents Converter cabinet units 18 Operating Instructions 07 2016 A5E03347396A ...
Страница 38: ...Device overview 2 5 Type plate Converter cabinet units 38 Operating Instructions 07 2016 A5E03347396A ...
Страница 679: ......
Страница 680: ......





















































