





























INSTALLATION
4
8024534 / 16UW / 2020-02-26
Operating Instructions | InspectorP Rack Fine Positioning
15
Subject to change without notice
4.1.2
SOPASair (web server)
The device is set up and parameterized using the SOPASair operating software.
You can call up the operating software with a web browser (recommendation: Google
Chrome). No installation of software is required. The device must be supplied with
voltage and connected to the computer via the Ethernet interface in order to use
the SOPASair web server.
Starting SOPASair
1.
Start web browser (recommendation: Google Chrome).
2.
Enter the device IP address into the address line.
The SOPASair user interface appears.
4.1.3
Saving parameter set
The currently valid parameter set can be backed up using SICK AppManager.
The complete environment of the device is then available if support is necessary.
Saving on the computer (backup)
1.
In the SICK AppManager, in the
Device
window, click on the
Backup
button.
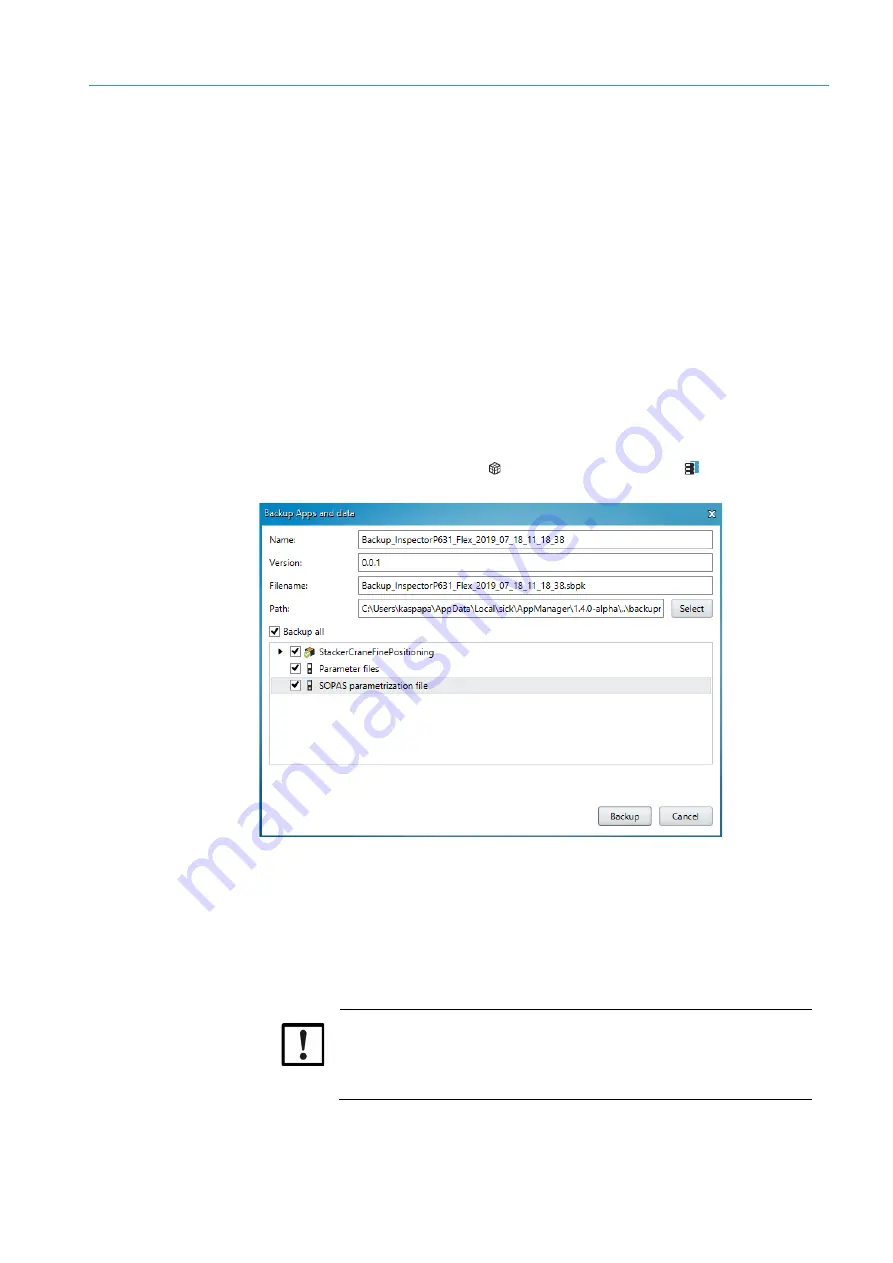
The
Backup Apps and Data
window opens.
2.
Fill out the
Name
,
Version
and
Filename
fields.
3.
Select the path for data backup.
4.
Select all available options.
5.
To run the backup, click on the
Backup
button in the
Backup Apps and Data
window.
Saving on a microSD memory card (cloning)
IMPORTANT
Risk of damage to the memory card!
▸
To avoid damaging the memory card, make sure the device is
de-energized when you insert or remove the card. For this purpose,
disconnect the device from the supply voltage accordingly.
Figure 4: “Backup Apps and data” window