


























12
Manual – MOVI-PLC® Application Solution "SyncCrane"
2
Functional principle of indirect positioning and synchronization
Description
2.3.3
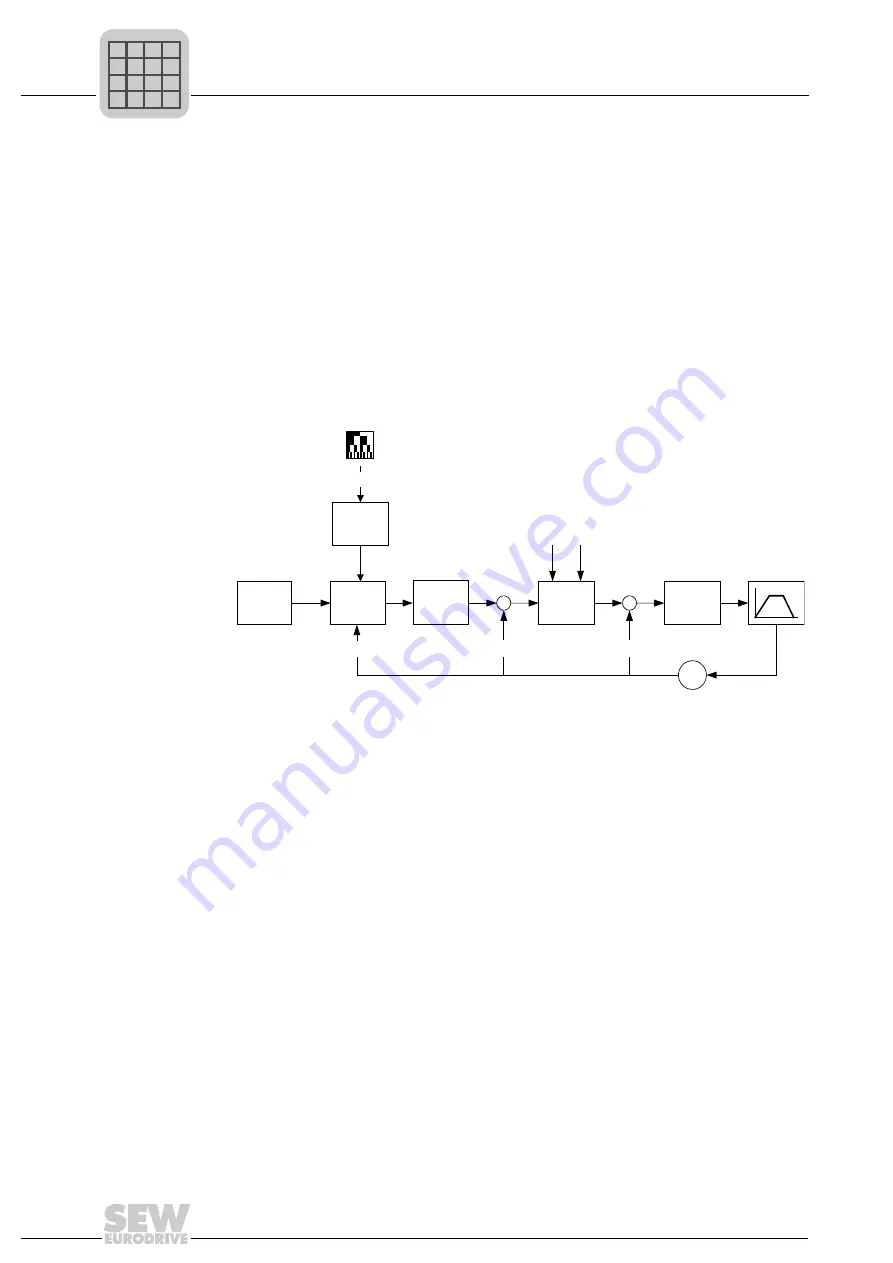
SyncCrane solution with indirect position control
Unlike direct position control, the absolute encoder signal is only evaluated for correct-
ing the specified target position.
During the travel process, the speed profile of the drive is therefore not changed.
Susceptibility to vibration caused by retroactive effects, for example deviations between
the absolute encoder detection and motor encoder detection, are minimized in this way.
The user can optimize time delays in absolute encoder sensing and setpoint processing
by setting an "override". The override causes an early and softer run-in to target, which
suppresses overshoots.
This function is part of the SyncCrane application module.
The following figure shows indirect position control with absolute encoder.
536587275
v
max
Maximum velocity
POS
act
Actual position motor encoder
a
max
Maximum acceleration
POS
set
Setpoint position motor encoder
PG
Profile generator
ABS
Absolute encoder
PC Position
controller
n
act
Actual speed
nC
Speed controller
Calc
Delta Inc
PG
MOVI-PLC
PC
nC
M
Pos
act
Pos
set
n
act
X15 Pos
act
V
max
a
max
DIP 11B
+
+
–
–
X62
ABS
P
i
f
kVA
Hz
n
P
i
f
kVA
Hz
n
Содержание MOVI-PLC
Страница 2: ...SEW EURODRIVE Driving the world ...
Страница 105: ......
Страница 106: ......
Страница 107: ...SEW EURODRIVE Driving the world ...