





























Input and Output Signals
Publication PUB091-004-00_0918
25 of 64
5
THE ACTUATOR INPUT AND OUTPUT SIGNALS
The MFU allows the actuator to be controlled by, and to report data to, a suitable host device using
Modbus RTU protocol. This section explains the data signals that are available for exchange and their
meaning in relation to the actuator functionality. The data locations used for the Modbus registers and
coils are given later in this manual.
This section also gives information on the other control inputs available for moving the actuator.
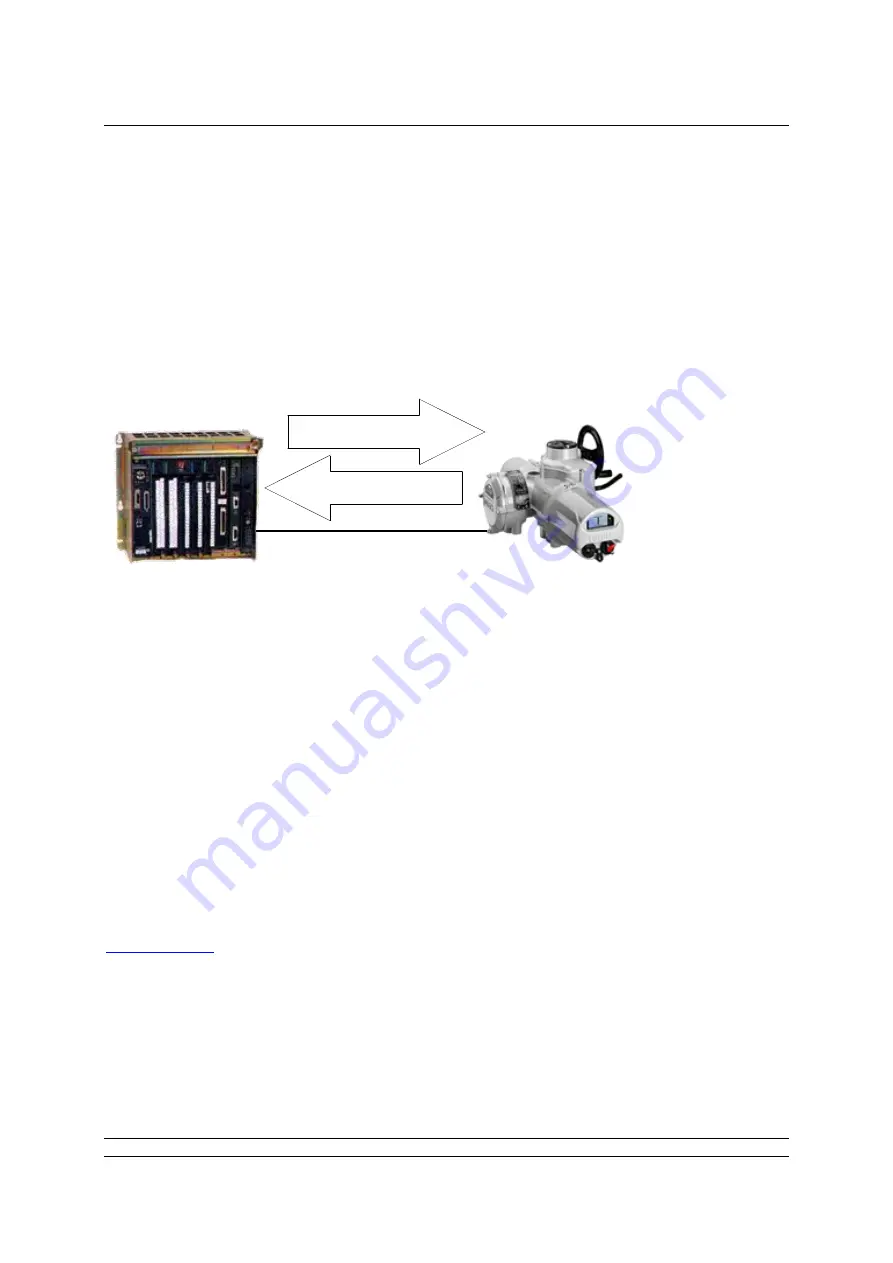
RS-485 data highway
Inputs - Feedback
Outputs - Commands
PLC
Actuator
Fig 15:
Input and Output Data Direction
Inputs
are defined as signals originating at the actuator and fed back to the PLC over the
RS-485 network, i.e. Inputs to the PLC.
Outputs
are defined as signals originating at the PLC and operating the actuator
controls, i.e. Outputs from the PLC.
5.1 Control Outputs
The MFU can be used to control the actuator to position the valve. The valve may be moved fully
closed, fully open or to an intermediate position. Additionally, the actuator can make the valve adopt
an Emergency Shut Down position or perform a partial stroke test. The actuator may also be operated
from its local controls, by hard wired direct contact inputs, or by the handwheel, where fitted. In the
case of hard wired control, the Auxiliary Input Mask and control source must be correctly set.
A description of the Auxiliary Input Mask and how to set it correctly is given in the IQ3 full
configuration, status and monitoring user manual, PUB002-040, available on the Rotork web site,
See also Section 8.1.5 for a similar explanation.
As well as controlling the actuator, the MFU can also be used to operate 4 discrete output relays when
the Digital Input / Output card also fitted within the actuator.







































































