

























Robotiq Wrist Camera Vision System for Universal Robots
Instruction Manual
Robotiq inc. © 2016
39
6.1.1 Center of Mass and Moment of Inertia
The coordinate system used to calculate the moment of inertia and center of mass of the Wrist Camera is the base of the Camera which correspond to the
UR tool flange reference [0,0,0].
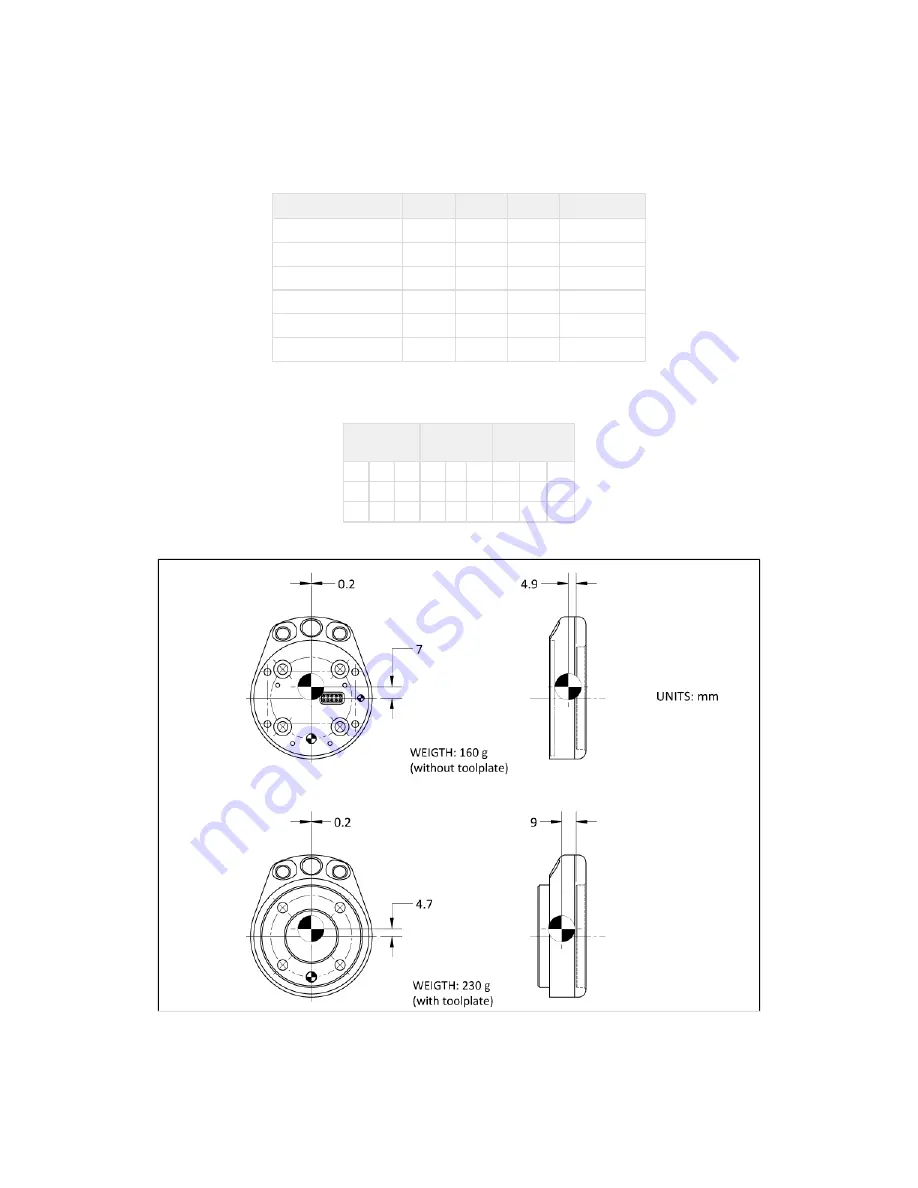
Here is the approximate position for the center of mass. It has been calculated for the camera itself and for combinations with other Robotiq products. The
camera's tool plate is included when the gripper is not mounted on the Wrist Camera.
Combination
x (mm)
y (mm)
z (mm)
Mass (grams)
-
0
5
9
230
FT 300
0
2
30
530
2-Finger 85
0
1
58
975
2-Finger 140
0
1
66
1040
FT 300 and 2-Finger 85
0
1
77
1275
FT 300 and 2-Finger 140
0
1
85
1340
Here is the approximate moment of inertia matrix for the Wrist Camera:
Inertia Matrix
Metric value
(kg * mm )
2
Imperial value
(lb * in )
2
Ixx
Ixy
Ixz
111
0
0
0.38
0
0
Iyx
Iyy
Iyz
0
70
3
0
0.24 0.01
Izx
Izy
Izz
0
3
165
0
0.01 0.56
Figure 6.1.1.1: Center of Mass with and without the toolplate.





















































