




















CAN Networking on Roboteq Controllers
50
CANBus Networking Manual
V2.0 July 8, 2019
commanded then bit 10 shall not alter, if bit 10 is supported
(see
Table 4-15). If bit 11 (in-
ternal limit active) of the statusword is 1, this shall indicate that an current limit has been
reached.
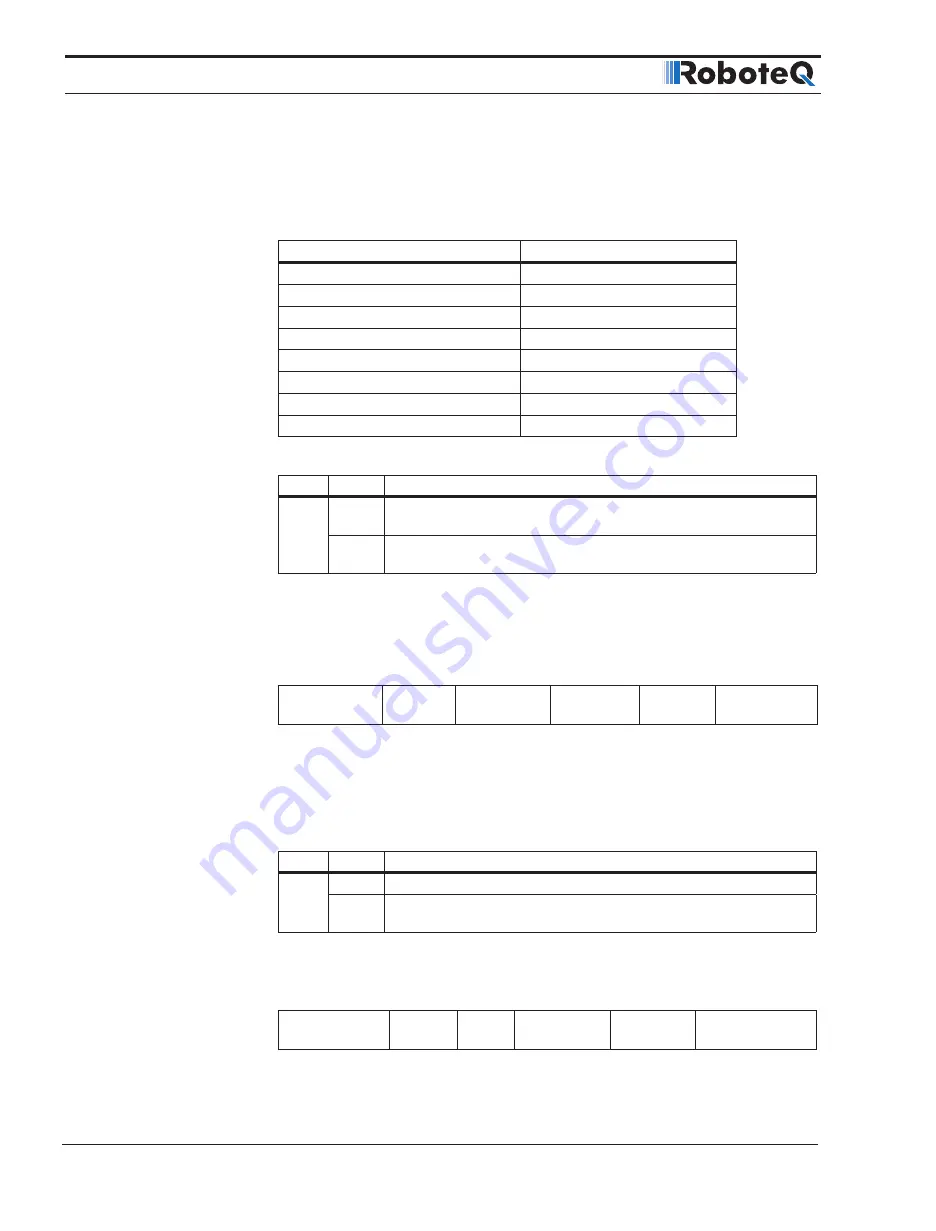
TABLE 4-14. State Coding
Status Word
PDS FSA state
xxxx xxxx x0xx 0000
b
Not ready to switch on
xxxx xxxx x1xx 0000
b
Switch on disabled
xxxx xxxx x01x 0001
b
Ready to switch on
xxxx xxxx x01x 0011
b
Switched on
xxxx xxxx x01x 0111
b
Operation enabled
xxxx xxxx x00x 0111
b
Quick stop active
xxxx xxxx x0xx 1111
b
Fault reaction active
xxxx xxxx x0xx 1000
b
Fault
TABLE 4-15. Definition of bit 10
Bit
Value
Definition
10
0
Halt (bit 8 in controlword) = 0: Speed or Position Target not reached
Halt (bit 8 in controlword) = 1: Axis decelerates
1
Halt (bit 8 in controlword) = 0: Speed or Position Target reached
Halt (bit 8 in controlword) = 1: Velocity of axis is 0
Profile Position Mode
TABLE 4-16. Status word mapping in profile position mode
15
14
13
12
11
10
9
0
see Table 12
Not Used
Set-Point
Acknowledge
see Table 12
Target
Reached
see Table 12
MSB
LSB
In Profile Position Mode the operation specific bits are mapped in Table 4-16. With bits 10
and 12 user can acknowledge the status of the controller as shown in Table 4-15 and Table
4-17. Bit 13 is always 0.
TABLE 4-17. Definition of bit 12 in Profile Position Mode
Bit
Value
Definition
12
0
Previous set-point already processed, waiting for new set-point
1
Previous set-point still in process, set-point overwriting shall be
accepted
Profile Velocity Mode
TABLE 4-18. Status Word Mapping in Profile Velocity Mode
15
14
13
12
11
10
9
0
see Table 12
Not
Used
Speed
see Table 12
Target
Reached
see Table 12
MSB
LSB





















































