

























CANBus Networking Manual
11
Basic Setup and Troubleshooting
If communication cannot be established, it can be difficult to determine the source of the
problem. Here are a few ways to diagnose:
Cable polarity, integrity and termination resistor
Verify that the controller’s CANH and CANL are connected to the CANH and CANL wire.
Check cable continuity to every node. Verify the presence of a least one resistor and that
its value is 120ohm (a value of 60 to 200 ohm would be acceptable)
Check CANbus activity using a voltmeter
The presence of CAN data traffic can be checked using a simple voltmeter and measuring
the voltage between GND and CANH, and between GND and CANL. When CAN is dis-
abled, both lines should have approximately the same voltage around 2.5V. When CAN is
enabled with RoboCAN or MiniCAN protocol selected, the controller will send a continu-
ous stream of data frames. This will cause the CANH voltage to rise above, and the CANL
voltage to drop below, the 2.5V midpoint. If the idle and active voltages do not match the
above, try again on the controller alone disconnected from the network but with a 100 to
200 ohm resistor across its CANH and CANL pins.
The CANOpen and RawCAN protocol should not be used for this test as these do not gen-
erate data traffic on their own and will not cause measurable voltage changes.
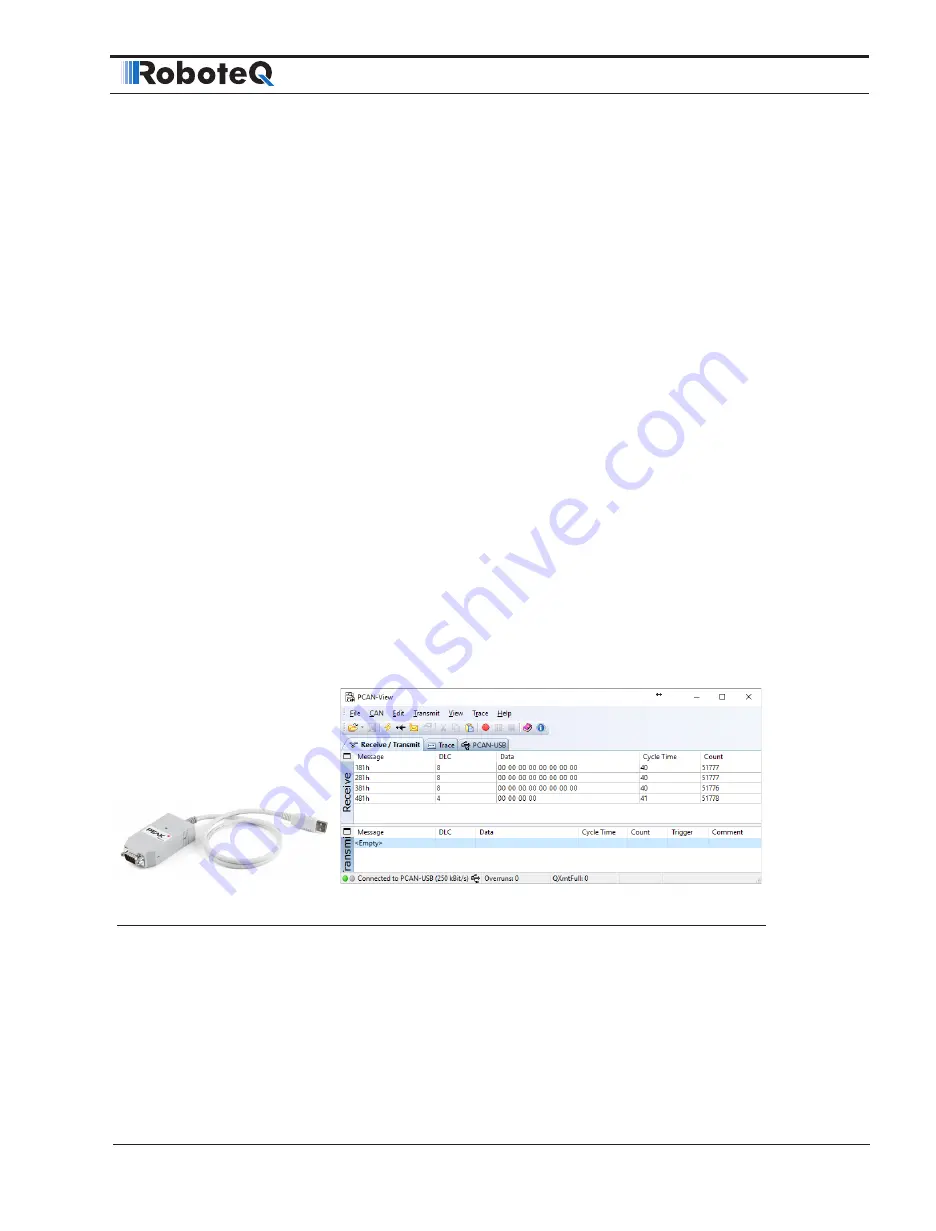
Check CANbus activity using a CAN sniffer
When working on a CAN system, it is highly recommended to make the acquisition of a
USB to CAN adapter such as the PCAN-USB from Peak Systems. Connect the adapter to
the CANH and CANL and run the sniffer software with the correct bit rate selected. The
figure below shows the expected received data when a Roboteq device is on the network
with MiniCAN protocol enabled.
Figure 1-6. USB to CAN adapter and MiniCAN frame capture
Mode Selection and Configuration
Mode selection is done using the CAN menu in the RoborunPlus PC utility.





















































