




























RS-Helios-1610 User Manual
18
Note: The following sections describe and define the valid payload (1248byte) of the protocols.
1) The main data stream output protocol MSOP, encapsulates the distance, angle, reflectivity and other
information measured by the LiDAR into an UDP packet and outputs to the computer;
2) Device information output protocol DIFOP, outputs various configuration information of the current
state LiDAR to the computer;
6.1 MSOP and DIFOP
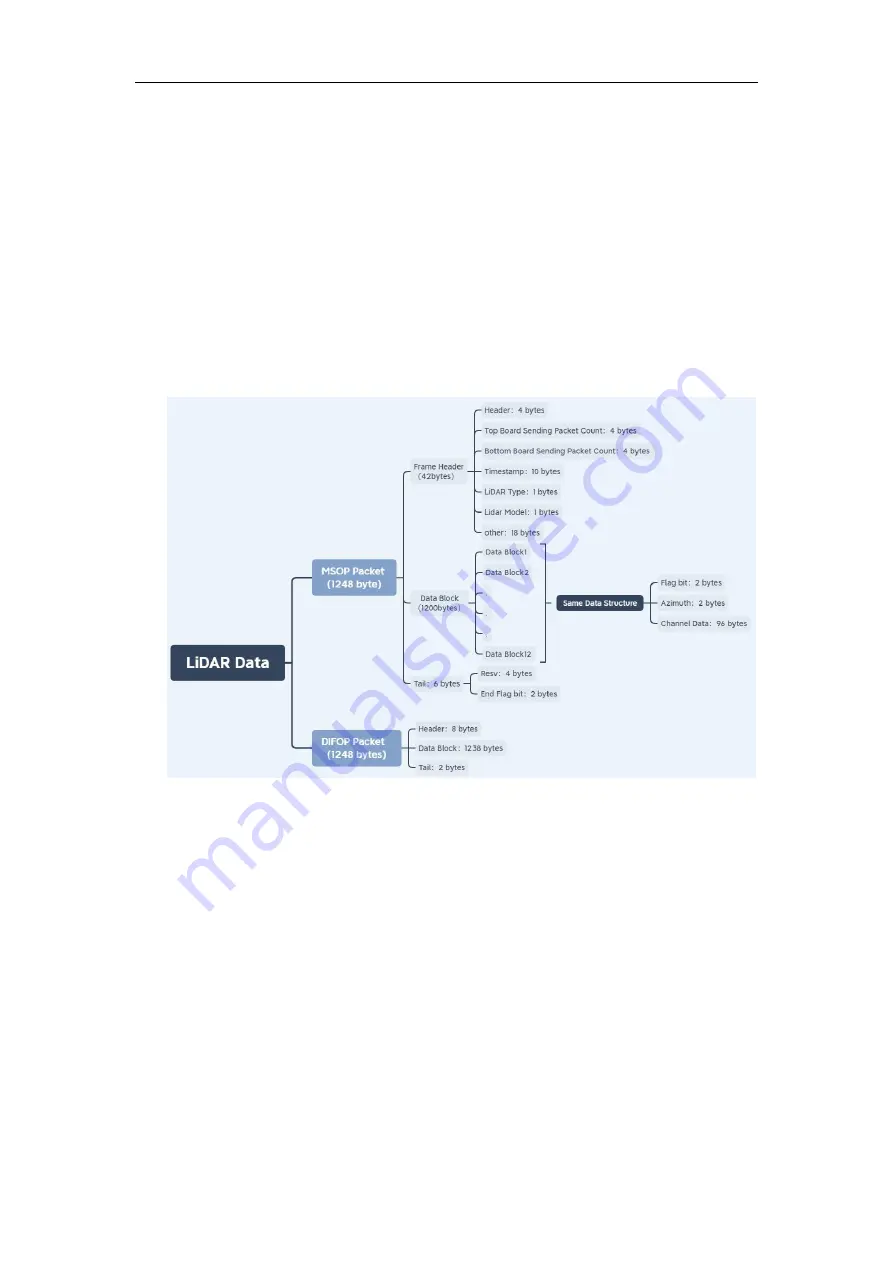
The UDP packet sent by RS-Helios-1610 has a payload of 1248 bytes, the data structure of the
main data stream output protocol (MSOP) and device information output protocol (DIFOP) is as
shown in the figure below:
Figure 11 UDP Packet Structure
6.2 Main Data Stream Output Protocol
(
MSOP
)
Main data Stream Output Protocol is abbreviated as MSOP
I/O type: device output, computer analysis
Default port number: 6699
6.2.1 Header
The header has 42 bytes and is used to identify the beginning of the UDP data packet. The
structure of the Header is as shown in the table below:
Содержание RS-Helios-1610
Страница 1: ...RS Helios 1610 User Manual RS Helios 1610...
Страница 58: ...RS Helios 1610 User Manual 52 Appendix E Mechanical Drawings...
Страница 60: ...RS Helios 1610 User Manual...





















































