





























R01AN5644EJ0100 Rev.1.00
Page 38 of 62
Jan 22, 2021
Reference Guide for a 2-Axis Robot Arm with 2-Phase Stepping
Motors Incorporating Resolvers
RX24T, RX72M,
RAA3064002GFP/RAA3064003GFP
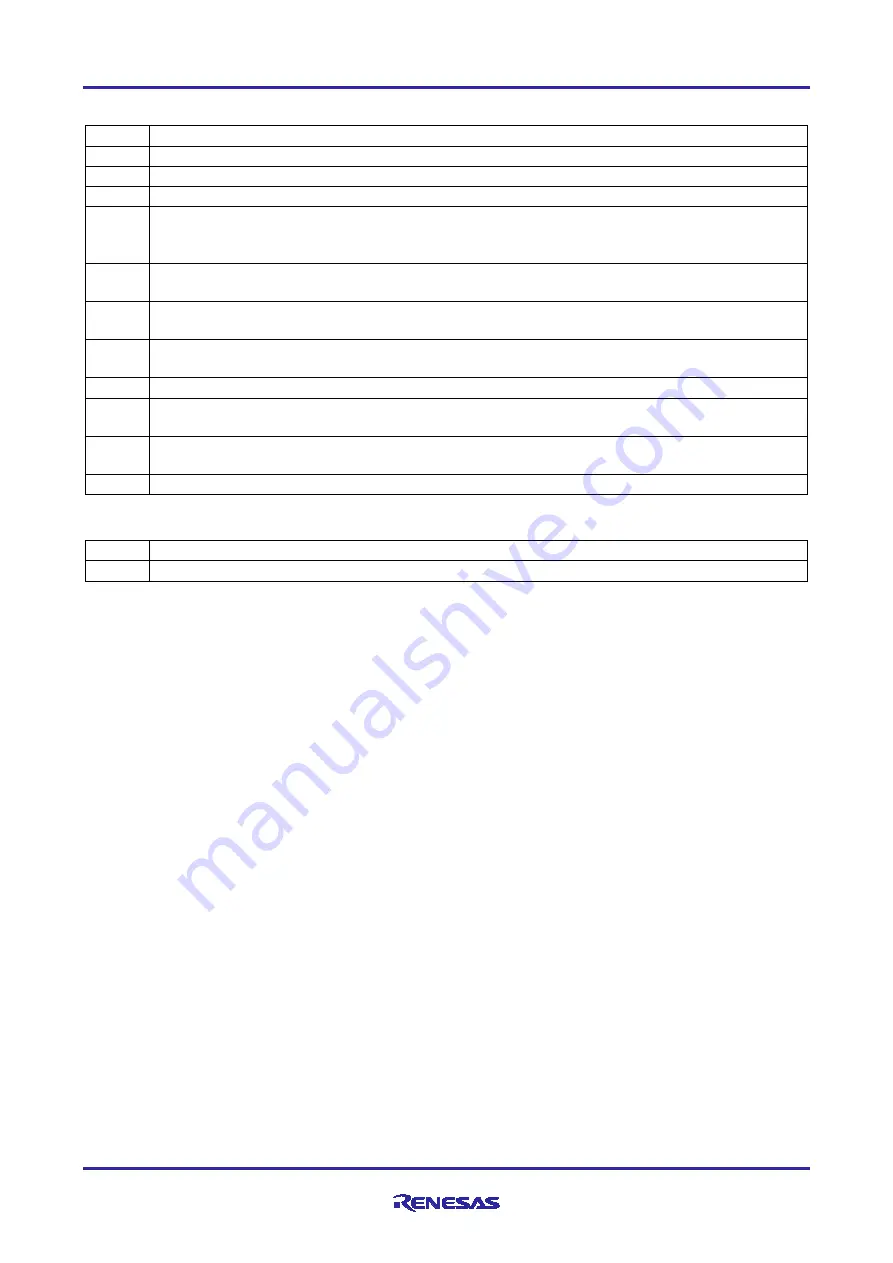
Table 2-6 RX24T State Judgment
No.
Error Condition
B-1
The RDY signal is 0.
B-2
The ERR0 to ERR3 bits of the 1-bit tangent-point data are non-0 in CP control mode.
B-3
The ERR0 to ERR3 bits of the 1-bit tangent-point data are non-0 during return to the origin.
B-4
A sync command receive error was received N times in a row from the same slave in CP control
mode.
(N: Retry count + 1)
B-5
When confirming the state of the RX24T before applying CP control, the position determination
end bit of the 1-bit tangent-point data is 0.
B-6
When confirming the state of the RX24T before applying CP control, the during return to origin
bit of the 1-bit tangent-point data is 1.
B-7
During return to the motor origin, the position determination end bit of the 1-bit tangent-point data
is 0.
B-8
In PTP control mode, the during return to origin bit of the 1-bit tangent-point data is 1.
B-9
When the state of the arm is output, the start of return to origin bit of the 1-bit tangent-point data
is 0.
B-10
When the state of the arm is output, the during return to origin bit of the 1-bit tangent-point data
is 1.
B-11
The cycle of a sync command is delayed in CP control mode.
Table 2-7 Error Processing
No.
Error Processing
C-1
After shifting the slave to PTP control mode by broadcasting, direct the servo to be turned off.







































































