





























生活美好,臂不可少
http://www.realman-robotics.com
27
vibrate. Please refer to Section 11 (Technical Specifications) document for specific
load-carrying capacity. A safety assessment must be carried out after each installation
of the robot, and operation should strictly follow the instructions in Section 1 (Safety).
6.3 Robot Workspace
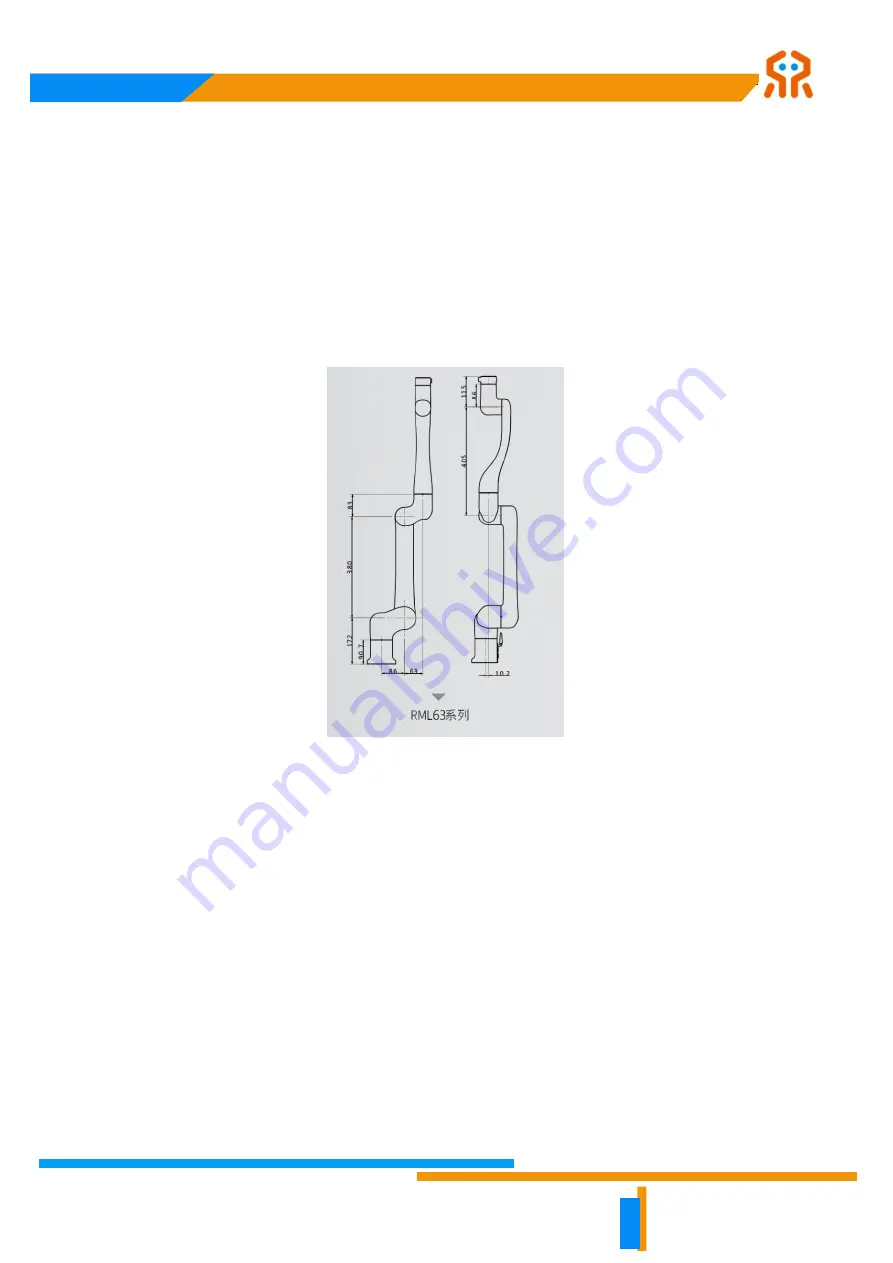
Fig. 6-1 shows the dimensions of RML63-B robot. The installation must consider the
range of the robot movement, to avoid contact with the surrounding personnel and
equipment.
Fig. 6-1 The dimensions of robot joints.
Fig. 6-2 shows the movement range of RML63-B robot. Excluding the cylindrical
space above and below the base, the movement range of the robot is a sphere with a
radius of 610 mm. When selecting the robot installation location, be sure to consider
the cylinder space above and below the robot and avoid moving the tools into the
cylinder space as much as possible. Moreover, the rotational range of each joint in
practical applications is listed as follows, i.e., rotation range of joint 1: ±180°, rotation
range of joint 2: ±130°, rotation range of joint 3: ±135°, rotation range of joint 4:
±180°, rotation range of joint 5: ±128°, and rotation range of joint 6: ±360°.





















































