





























生活美好,臂不可少
http://www.realman-robotics.com
25
Digital Input
Min
Typical
Max
Unit
input power Vin
0
——
24
V
input voltage
-0.5
24
V
logic low level
1
V
logic high level
Vin-0.5
V
5.3.2 Digital I/O Output
There are two digital output channels at the tool end, which can be configured directly
through the controller by teach pendant software or JSON protocol. The electrical
characteristics are shown in the table below.
Digital
Output
Min
Typical
Max
Unit
input
power Vin
0
——
24
V
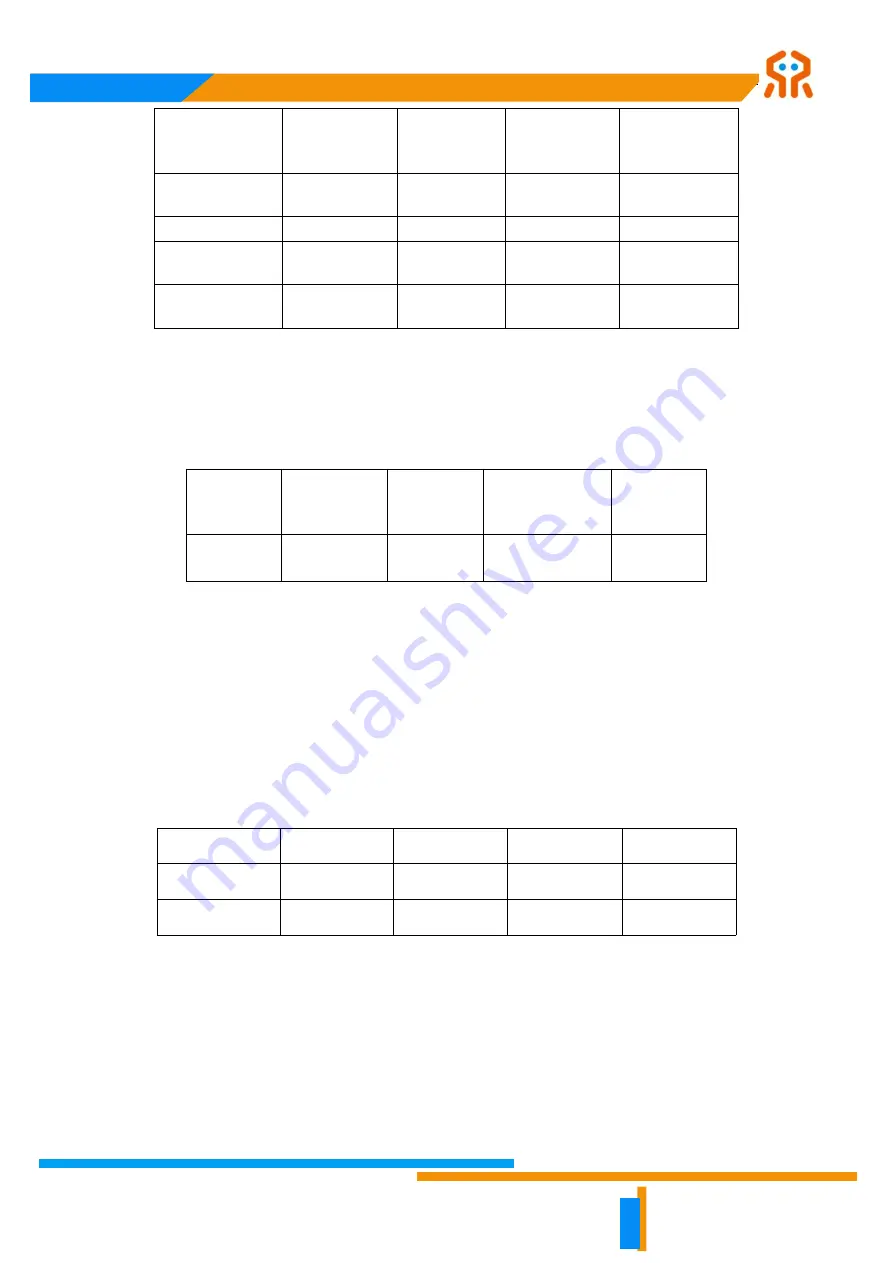
5.3.3 Power Output
The tool end of the robot can output 5V or 12V or 24V power supply. When the
output voltage is 24V, the actual output voltage is the same as the power supply
voltage of the robot. If the power supply voltage is unstable, the output voltage will be
affected. The power output type can be configured and switched on and off via the
teach pendant software or JSON protocol. The electrical characteristics are shown in
the table below.
Hyperparameter
Min
Typical
Max
Unit
power voltage
0
——
24
V
power current
——
1000
1500
mA
Note: When supplying power to the end tool through the end power supply, refer to
the above table for current limits to prevent overload and burn out the end interface
board.
5.3.4 Communication Interface
The robot has one RS485 communication port at each of the 26-core aviation plug of
the controller, and the 6-core aviation plug of the end interface board (only for the







































































