





























6.3 Alarms
Alarms are raised by the autopilot system to alert you to mechanical and electrical conditions requiring
your attention.
The Evolution components transmit alarm alerts on the SeaTalkng® network for display on autopilot
controllers and MFDs, along with an audible alert. The Evolution components stop raising an alarm when
the alarm condition ceases or the alarm is acknowledged on the autopilot controller or MFD. If the alarm is
safety-critical it will be raised again after a timed delay.
Unless otherwise stated in the table below, you should respond to alarms by selecting
OK
or
Acknowledge
on your autopilot controller or MFD.
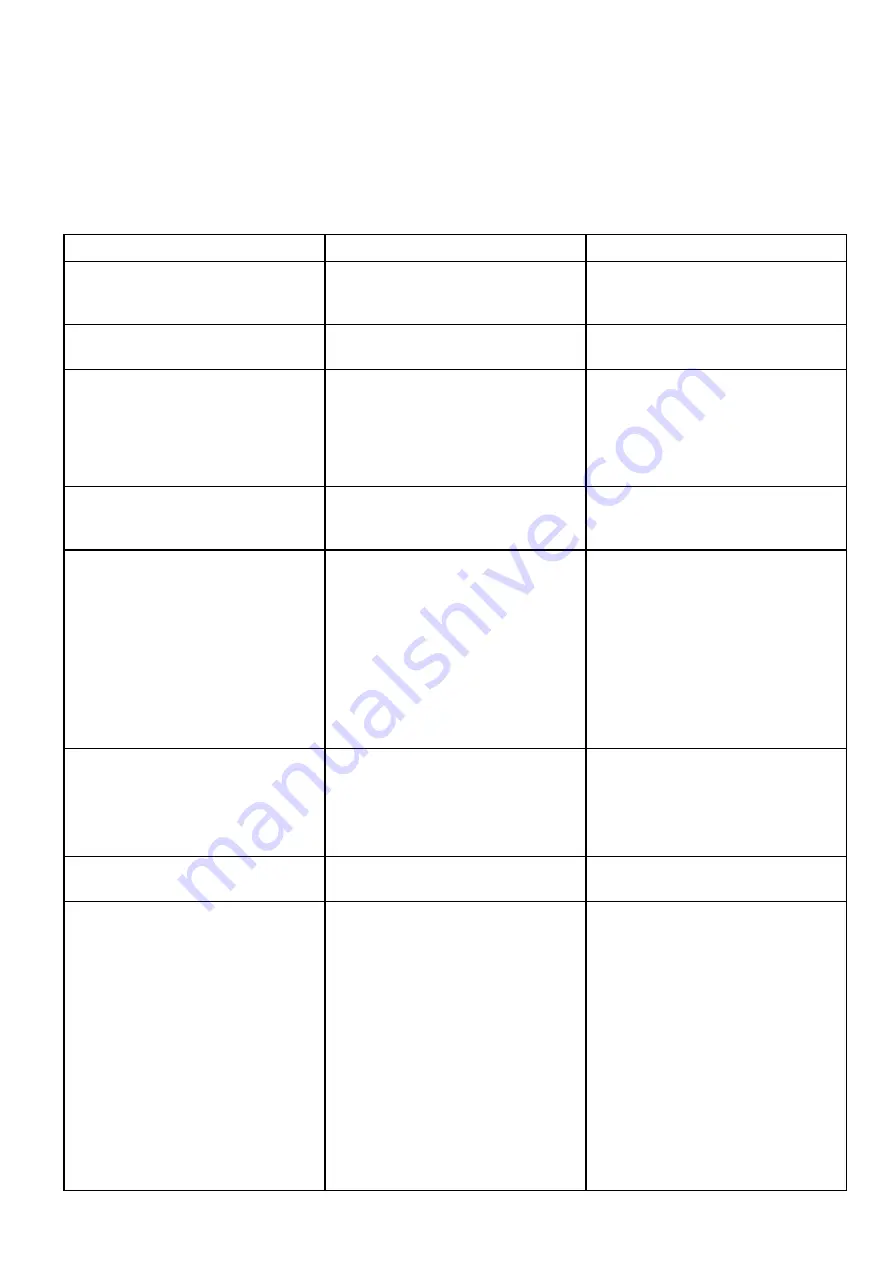
Alarm Message
Possible causes
Solution
OFF COURSE
Autopilot has deviated from planned
course.
Check your vessel position and if
necessary take manual control to steer
the vessel back on course.
WIND SHIFT
Autopilot is unable to maintain navigation
to the current wind angle.
LOW BATTERY
Power supply voltage has dropped below
acceptable limits. Caused by low battery
voltage or voltage drop at the ACU
unit (EV-1 systems only), due to poor
connections or inadequate wiring.
Acknowledge the alarm and then start the
engine to recharge the battery. If problem
persists, check wiring connections and
that the quality and gauge of wiring is
adequate for the current draw of the drive
unit.
LARGE XTE
Large cross-track error. The autopilot
has deviated more than expected from
a planned course.
Check your vessel position and if
necessary take manual control to steer
the vessel back on course.
CU DISCONNECTED
The autopilot control head has been
disconnected.
• Check the physical cables and
connections between the autopilot
control head and the SeaTalkng®
system. Also between the EV-1 / EV-2
and the SeaTalk
ng
system.
• If the autopilot control head is
connected via a SeaTalk® to
SeaTalkng® converter, check the
converter is using the latest software
version.
AUTO RELEASE
Possible fault with rudder reference unit.
Alternatively, if your autopilot system
includes a stern I/O drive, you have taken
manual control of the steering while the
pilot is in Auto mode.
• Check rudder reference unit
connections.
• For systems using the Volvo Penta
EVC drive interface unit, check the
unit is operating correctly.
WAYPOINT ADVANCE
The autopilot has steered the vessel to
the current waypoint.
Acknowledge the turn to the next
waypoint.
DRIVE STOPPED
• Motor / steering has not moved within
20 seconds of a course change
command.
• The autopilot is unable to turn the
rudder (either because the weather
load on the helm is too high, or if the
rudder position sensor has passed
beyond the preset rudder limits or
rudder end-stops.
• Autopilot resets due to an external
event (such as use of the sleep switch,
or faulty wiring causing the autopilot
components to power cycle).
• Autopilot resets due to software error.
• Check the rudder reference unit has
been installed correctly to reflect the
limits and end-stops of the vessel’s
rudder system.
• For EV-1 systems, check ACU drive
output voltage and drive and clutch
voltage output (if applicable).
• For EV-1 systems, check all
connections to ACU.
• Check all connections to drive unit.
• Check that the drive unit operates and
is not stalled.
• Check steering system is secure.
System checks and troubleshooting
51