





























Document Version V1.1.0(01/11/2023) 53
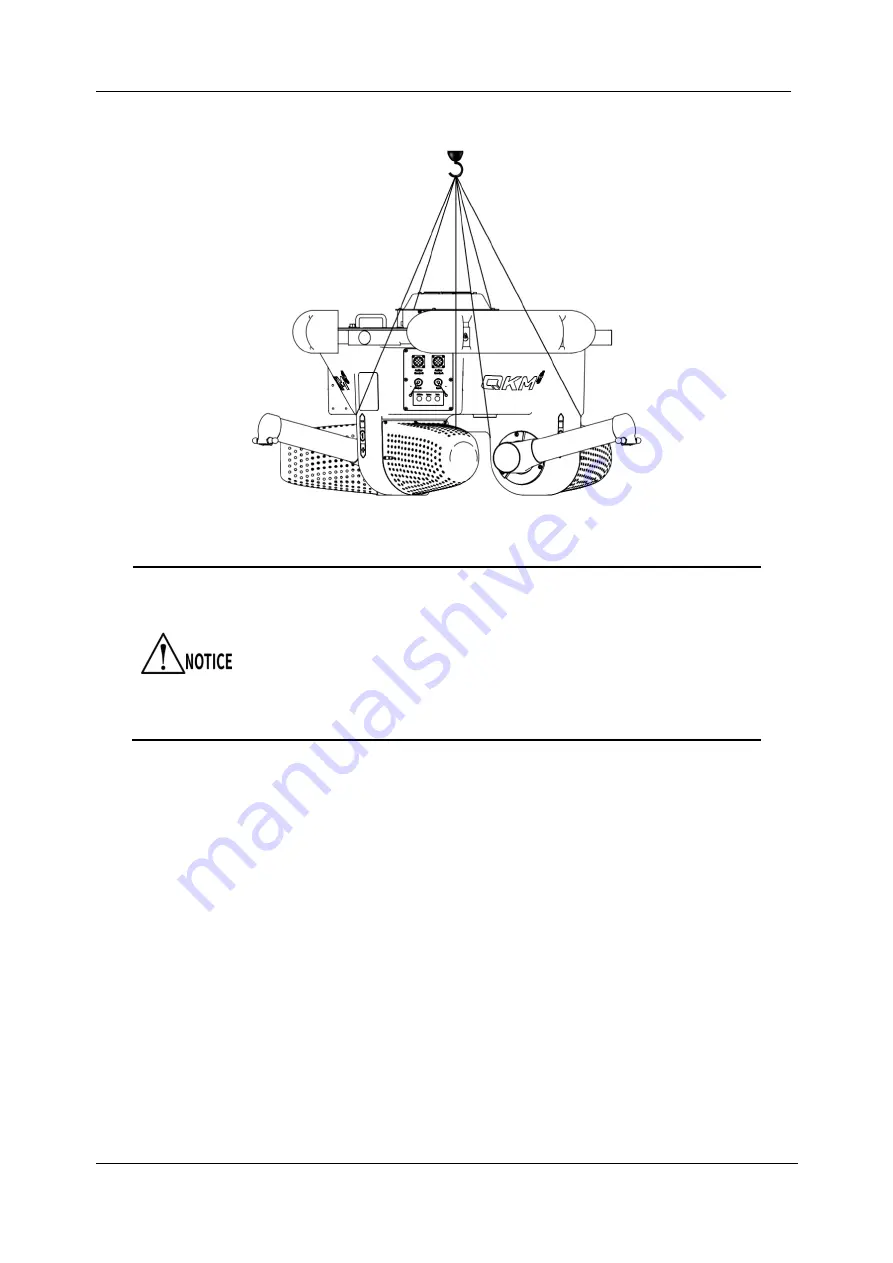
Figure 5-17 Winding of lifting belts during upward installation
Do not exert any external force on the master arm during
hoisting to prevent damage to the master arm and surface
paint of the robot.
5.4
Installation of slave arm
Step 1
Connect the 230 V a.c. interface on the panel 3 to the power to power on
the robot as shown in Figure 5-18.
Step 2
Press and hold the "Brake" button on the panel 1. The three master arms
of the robot can move freely. Manually move the three master arms of
the robot from their initial position (a) to the installation location (b), as
shown in Figure 5-19, and then disconnect the power.
Содержание AP3X
Страница 1: ...is the trademark of QKM Technology Dongguan Co Ltd QKM has been granted ownership of this trademark...
Страница 132: ...AP3X Robot User Manual 110 Document Version V1 1 0 01 11 2023 Figure 7 46 Jog teach Figure 7 47 Teach interface...
Страница 155: ...Appendix A Dimensions of moving platform installation surface Document Version V1 1 0 01 11 2023 133...


































































