





























Chapter 5 Function parameter
141
in the current operating frequency, and then continues to ac/decelerate upon the decline of
the output current.
Overcurrent stall gain is used for adjusting inhibition overcurrent capability during
ac/deceleration. The greater this value, the stronger inhibition overcurrent capability
Under the premise that the overcurrent does not occur, the best is the smaller gain setting.
For the small inertia load, the overcurrent stall gain should be small, otherwise which
cause the slower system dynamic response. For the big inertia load, the overcurrent stall
gain should be large, otherwise the poor inhibitory effect may cause overcurrent fault.
When the overcurrent stall gain is set to 0, the overcurrent stall function will be canceled.
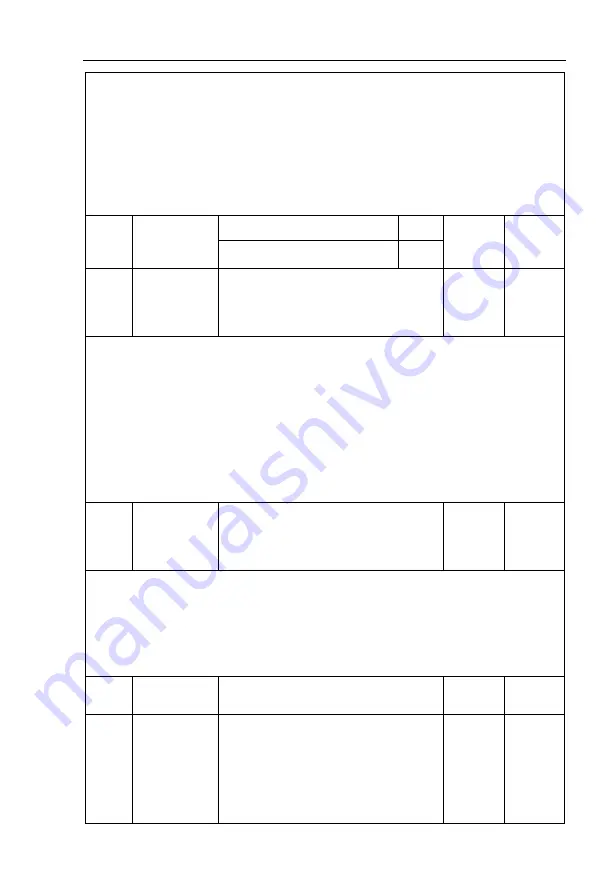
F8.02
Motor
overload
protection
Prohibit
0
1
☆
Allow
1
F8.03
Motor
overload
protection
gain
0.20 to 10.00
1.00
☆
F8.02 = 0: no motor overload protection function, there may be the risk of damage to
the motor due to overheating, it is recommended that the thermal relay is installed
between the inverter and the motor;
F8.02 = 1: the inverter will determine whether the motor is overloaded or not
according to the inverse time curve of motor overload protection. Inverse time curve of
motor overload protection: 220% x (F8.03) x rated motor current, if this lasts for 1 second,
the alarm of motor will be prompted overload fault; 150% x (F8.03) × rated motor current,
if this lasts for 60 seconds, the alarm of motor overload will be prompted.
User shall correctly set the value of F8.03 according to the Actual motor overload
capacity, if the value is set to too large , which may easily lead to motor overheating and
damage while the inverter will not alarm!
F8.04
Motor
overload
pre-alarm
coefficient
50% to 100%
80%
☆
This function is used in the front of motor overload fault protection, and sends a pre-
alarm signal to the control system by DO. The warning coefficient is used to determine the
extent of pre-alarm prior to motor overload protection. The higher the value, the smaller
the extent of pre-alarm in advance.
When the cumulative amount of inverter output current is greater than the product of
the inverse time curve of overload and F8.04, the inverter multi-function digital DO will
output "Motor Overload Pre-Alarm" ON signal.
F8.05
Overvoltage
stall gain
0 (no overvoltage stall) to 100
0
☆
F8.06
Overvoltage
stall
protection
voltage
/
energy
consumption
brake
120% to 150%(three-phase)
130%
☆