





























User Manual
E727T0005, valid for E-727
BRO, 2019-06-28
Physik Instrumente (PI) GmbH & Co. KG, Auf der Roemerstrasse 1, 76228 Karlsruhe, Germany
Page 164 / 240
Phone +49 721 4846-0, Fax +49 721 4846-1019, Email
EtherCAT Interface
Overview
E-727.xxxF and .xxxAF models are equipped with an EtherCAT interface for control by an EtherCAT
master. The E-727 with the connected piezo nanopositioning system behaves like an intelligent
multi-axis drive according to the CiA402 drive profile. The EtherCAT master specifies target
positions and velocities for the axes of the E-727 and receives the position feedback from the axes.
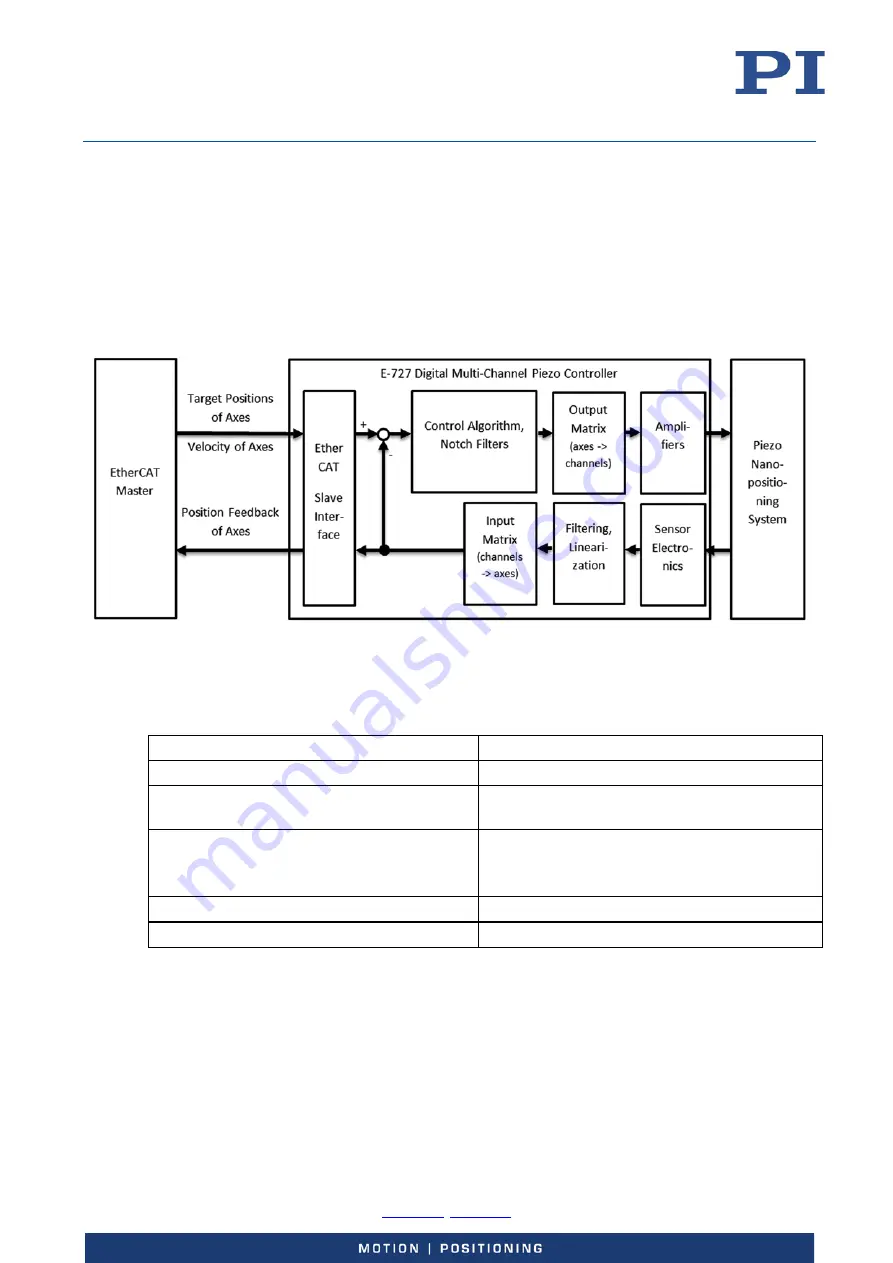
Figure 37: E-727 with piezo nanopositioning system controlled by EtherCAT master. EtherCAT communication
state: OPERATIONAL; drive state: Operation Enabled.
The table below gives an overview over the most important characteristics of control via EtherCAT
master for E-727:
Field bus protocol:
EtherCAT (CoE = CANopen over EtherCAT)
Drive profile:
CiA402 Drive Profile (IEC 61800-7-201)
Cycle time for specification of data (e.g.,
target positions) by the EtherCAT master
2 ms
Supported modes of operation according to
IEC 61800-7-201:
Cyclic Synchronous Position (CSP)
Profile Position (PP)
Homing (performs AutoZero)
Supported synchronization modes:
SyncManager (SM)
Connector for connection to field bus:
RJ45 socket
For basic information on EtherCAT networks and the CiA402 drive profile, see the documents listed
on p. 9.
For implementing a PI controller in TwinCAT 3.1, see the examples in the \Samples\TwinCAT
directory of the E-727 CD which is in the scope of delivery.