





























5 Functionality
Y
0
I m a g e N b r :
1
2
3
L a s e r F i n d e r W
i n d o w
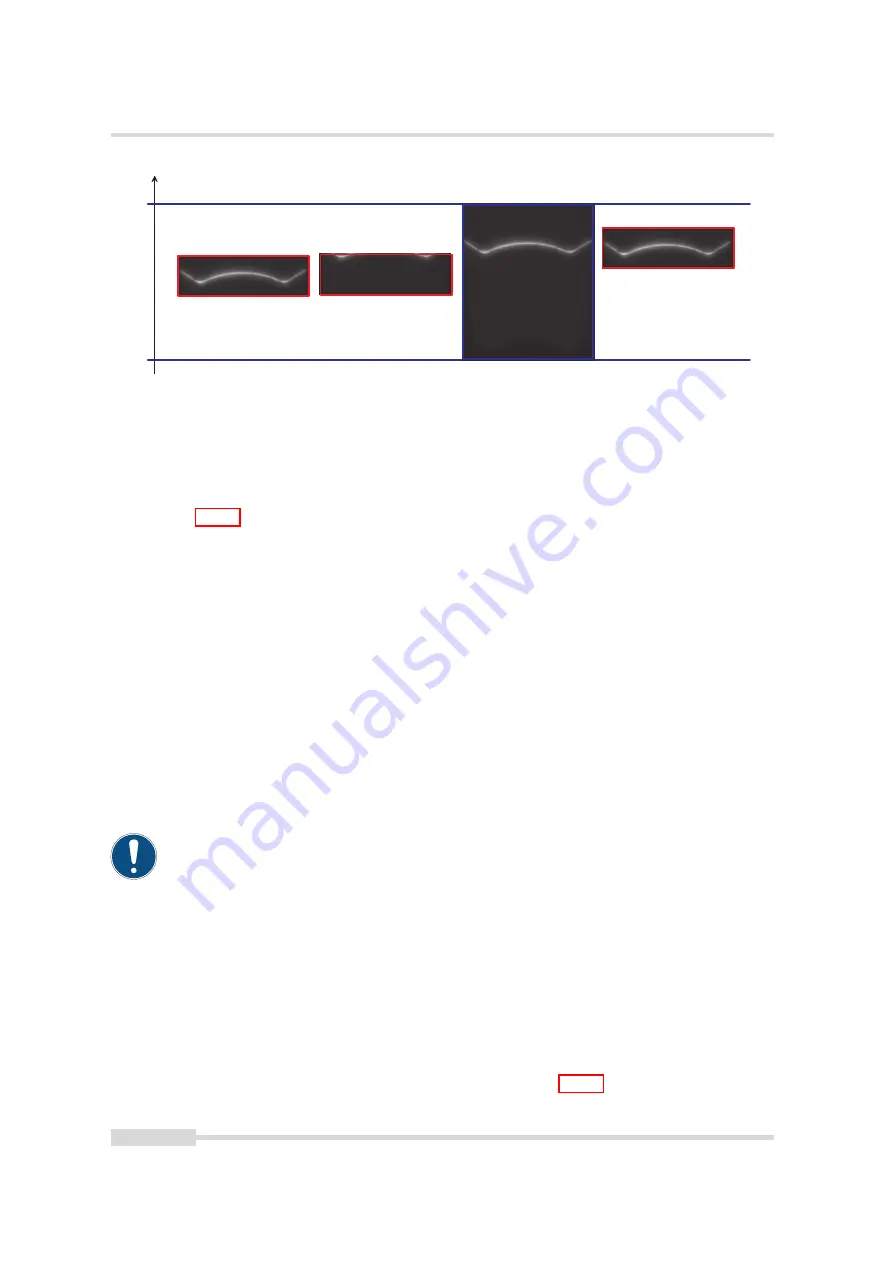
Figure 5.18: Laser Finder
Moving ROI and status information
Some values specific to the moving ROI feature are available in the status information fields
(see Section 5.10.2). Specially the moving ROI status can be useful to monitor.
Moving ROI smoothing
The moving ROI feature uses the minimal and maximal laser line coordinate to calculate the
position of the 3D-ROI. If there are outlier pixels, e.g. due to reflections then the calculation
can produce a window position that is not optimal. In this case it might be better to smooth
the laser coordinate prior to the position calculation. The property
Peak0_MovingROISmoothing
sets the smoothing level:
None
No smoothing is applied
MA8
A moving average of 8 pixels is used for smoothing
MA16
A moving average of 16 pixels is used for smoothing which results in the highest
amount of smoothing
Columns where no position is determined are simply skipped when calculating the moving
average, meaning the 8 or 16 previous positions that were valid are used for calculating the
next value.
Smoothing is only used for the calculation of the position of the 3D-ROI in the
moving ROI feature but has no impact on the 3D data output of the camera.
Considerations in using moving ROI
The moving ROI feature should be considered if the horizontal position of the detected laser
line changes in the course of the detection. A typical case is the examination of flat surfaces:
the deviation of the laser line in every profile is rather small, but the vertical position of the
detected laser line might change due to vibrations or if the surface is not parallel to the
conveyor belt.
Gradual changes of the vertical position are optimal for the moving ROI feature. Abrupt
changes can be handled by the Laser Finder feature (see Section 5.2.14) at the cost of losing
some profiles.
50 of 127
MAN075 05/2017 V1.0
Содержание MV1-D2048-3D06 series
Страница 1: ...Photonfocus MV1 D2048 3D06 Camera Series 3D CMOS camera with GigE interface MAN075 05 2017 V1 0...
Страница 10: ...1 Preface 10 of 127 MAN075 05 2017 V1 0...
Страница 12: ...2 Introduction 12 of 127 MAN075 05 2017 V1 0...
Страница 16: ...3 How to get started 3D GigE G2 Figure 3 3 PFInstaller components choice 16 of 127 MAN075 05 2017 V1 0...
Страница 26: ...3 How to get started 3D GigE G2 26 of 127 MAN075 05 2017 V1 0...
Страница 32: ...4 Product Specification 32 of 127 MAN075 05 2017 V1 0...
Страница 66: ...5 Functionality 66 of 127 MAN075 05 2017 V1 0...
Страница 82: ...6 Precautions 82 of 127 MAN075 05 2017 V1 0...
Страница 120: ...12 Support and Repair 120 of 127 MAN075 05 2017 V1 0...
Страница 122: ...13 References 122 of 127 MAN075 05 2017 V1 0...
Страница 127: ...C Revision History Revision Date Changes 1 0 May 2017 First version MAN075 05 2017 V1 0 127 of 127...







































































