





























AIR10-1420A Operation Manual
Performance of AIR10-1420A Manipulator
27
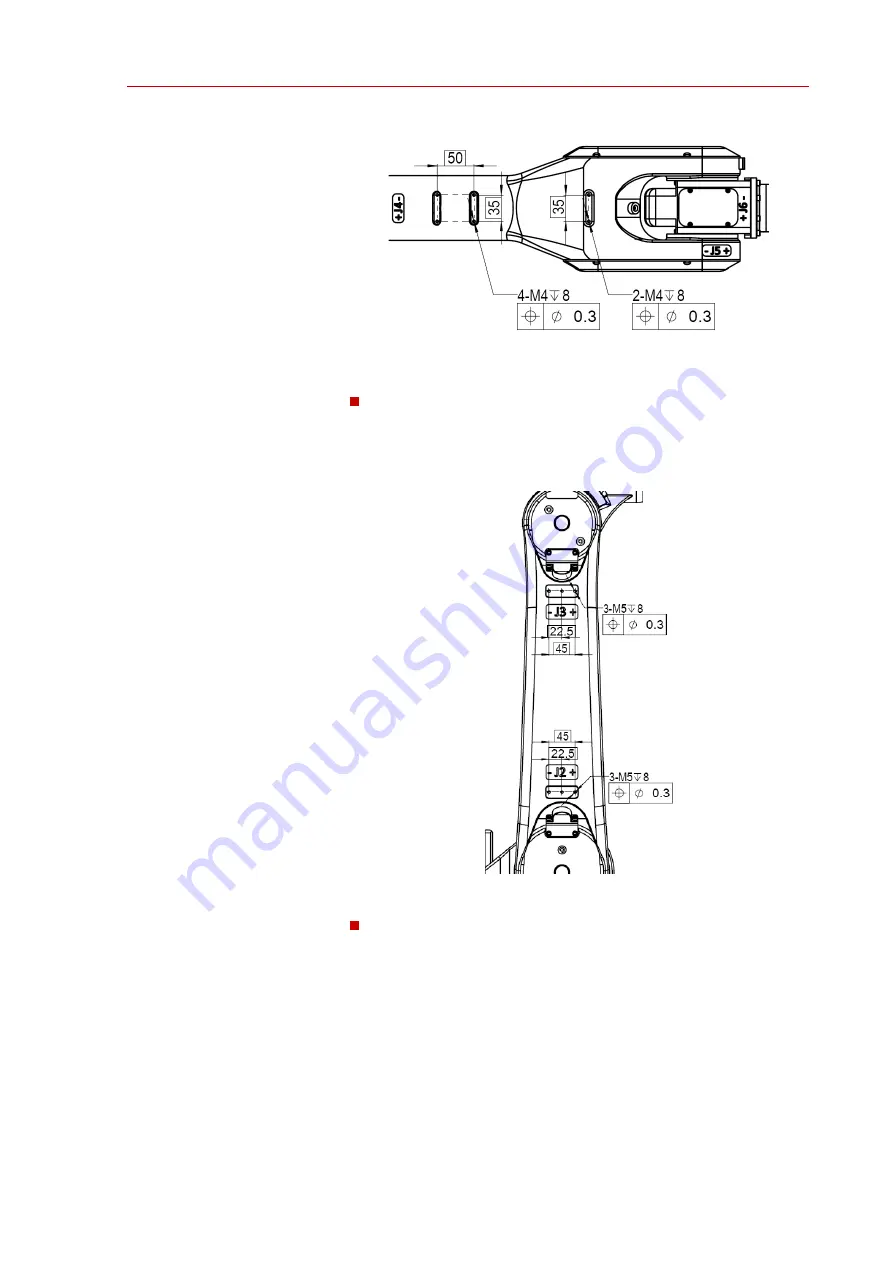
Fig. 9-6 Diagram of AIR10-1420A Manipulator Forearm Interface
Fixing Location of Manipulator Upper arm
Interface specification and size of manipulator upper arm is as shown in
Fig. 9-7 Diagram of AIR10-1420A Manipulator Upper Arm
Fixing Location of Manipulator Shoulder
Interface specification and size of manipulator shoulder is as shown in







































































