





























6. EtherCAT Object Dictionary
79
6.5.17
Object 607Ch: Home
offset
Index
Sub
index
Name
Type
Access
SAVE
PDO
Mapping
Value
Range
Default
Value
607Ch
0
Home offset
I32
RW
Yes
No
-2147483648
21474
∼
83647
0
This object sets value
of difference
between sensor origin position and mechanical origin position. During origin
search mode, completes origin search by set mode at Home Method then moves by
Home Offset distance. If set
value is over 0, move direction and less than 0, move toward -direction.
6.5.18
Object 607Dh: Software position limit
Index
Sub
index
Name
Type
Access
SAVE
PDO
Mapping
Value
Range
Default
Value
607Dh
0
Number of entries
U8
RO
No
No
2
1
Min position range limit
I32
RW
Yes
No
-2147483648
21474
∼
83647
-2147483648
2
Max position range limit
I32
RW
Yes
No
-2147483648
21474
∼
83647
2147483647
Absolute position range where position objects can be positioned. Controller is unable to get out of this range. If
needs to move position out of this range, target position can be adjusted within range and if current position
currently is out of range, Status word of ‘Internal Limit Active’ Bit goes SET and unable to move to correspondent
direction.
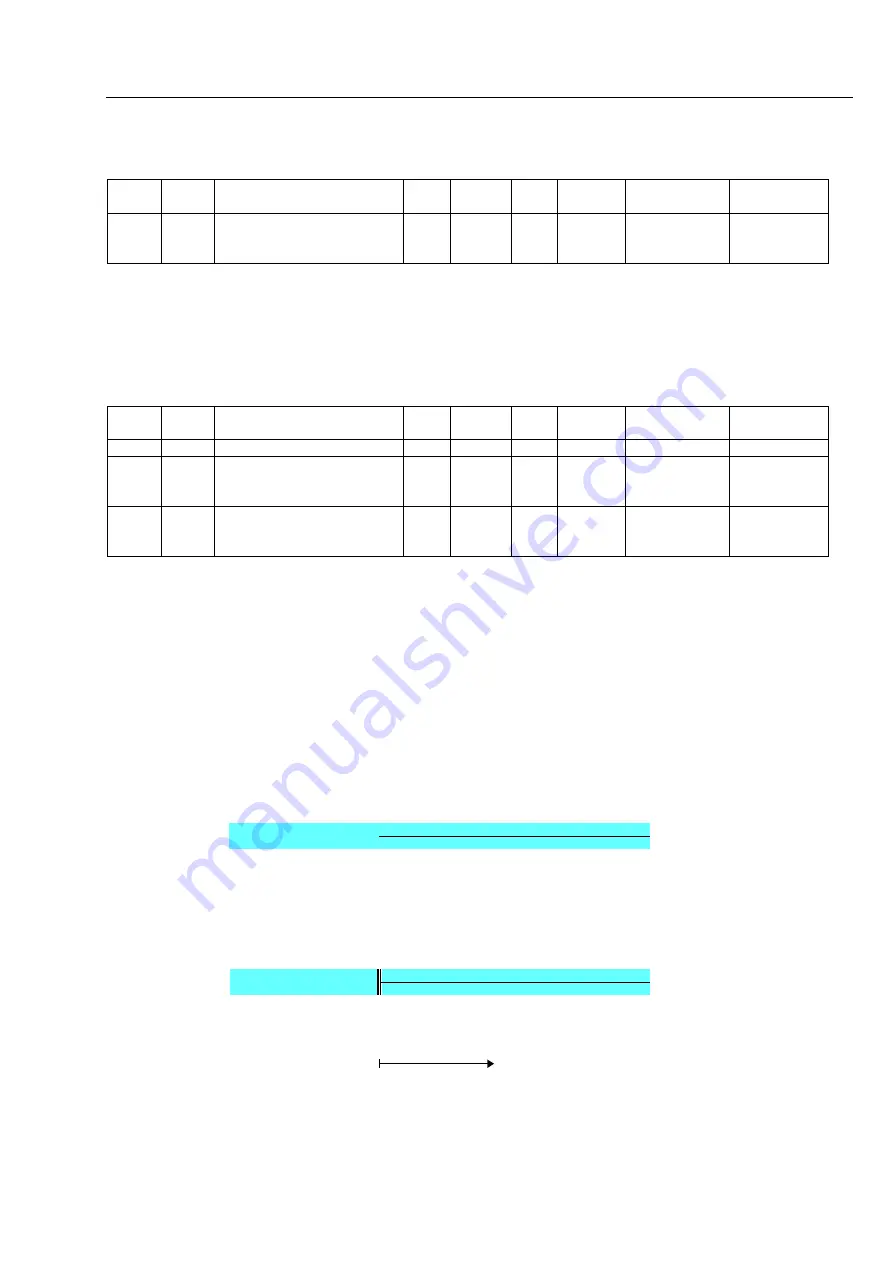
Software Position Limit is based on Sensor origin. If Home
Offset
has set by not 0 but other value, Actual Software
Position Limit needs to be used after adjustment by Home
Offset.
This object is unable to be operated under Cyclic Synchronous Position Mode.
Actual movable Min. position = Min Position Limit - Home
Offset Actual
movable Max. position = Max Position Limit - Home
Offset
Min. Limit
Sensor Origin ( = Machine Origin)
Max. Limit
-1000
0 (Home Offset = 0)
2000
Sensor Origin
Machine Origin
Corrected Min. Limit = -1500
0
Home Offset = 500
Figure 6.1: Origin Offset
Corrected Max. Limit = 1500
Содержание ECL E Series
Страница 6: ...Introduction Before Operation 6 ...
Страница 8: ...Chapter 1 Product Specification 10 ...
Страница 9: ...11 1 1 Part Numbering ...
Страница 10: ......
Страница 11: ...13 1 2 Product Dimension Figure 1 3 Dimensions ...
Страница 14: ...Chapter 2 Installation 16 ...
Страница 16: ...2 2 System Configuration EtherCAT Cable Figure 2 1 System Configuration Diagram ...
Страница 17: ...2 3 External Wiring Diagram ...
Страница 18: ......
Страница 24: ... Less than 30V of supplyvoltage Less than 15mA of current flow ...
Страница 26: ...Chapter 3 EtherCAT Communication ...
Страница 27: ... 26 ...
Страница 28: ......
Страница 36: ...Chapter 4 CiA 402 Drive Profile ...
Страница 37: ... 34 ...
Страница 38: ......
Страница 46: ...9 15 Reserved Table 4 12 Profile Position Mode of Control Word Please refer to 4 3 for the rest of bits ...
Страница 52: ...Please refer to drive status control for the rest of bits ...
Страница 66: ...Chapter 5 Operataion ...
Страница 67: ... 59 ...
Страница 72: ...Chapter 6 EtherCAT Object Dictionary ...
Страница 73: ... 63 ...
Страница 82: ......
Страница 89: ...6 EtherCAT Object Dictionary 77 6061h 0 Mode of operation display I8 RO No Tx PDO ...
Страница 107: ...6 EtherCAT Object Dictionary ...