





























Bit
Value Description
13
1
Following Error generated.
Table 4.19: Status word of Bit 13
4.5.4
Position movement method
General Movement
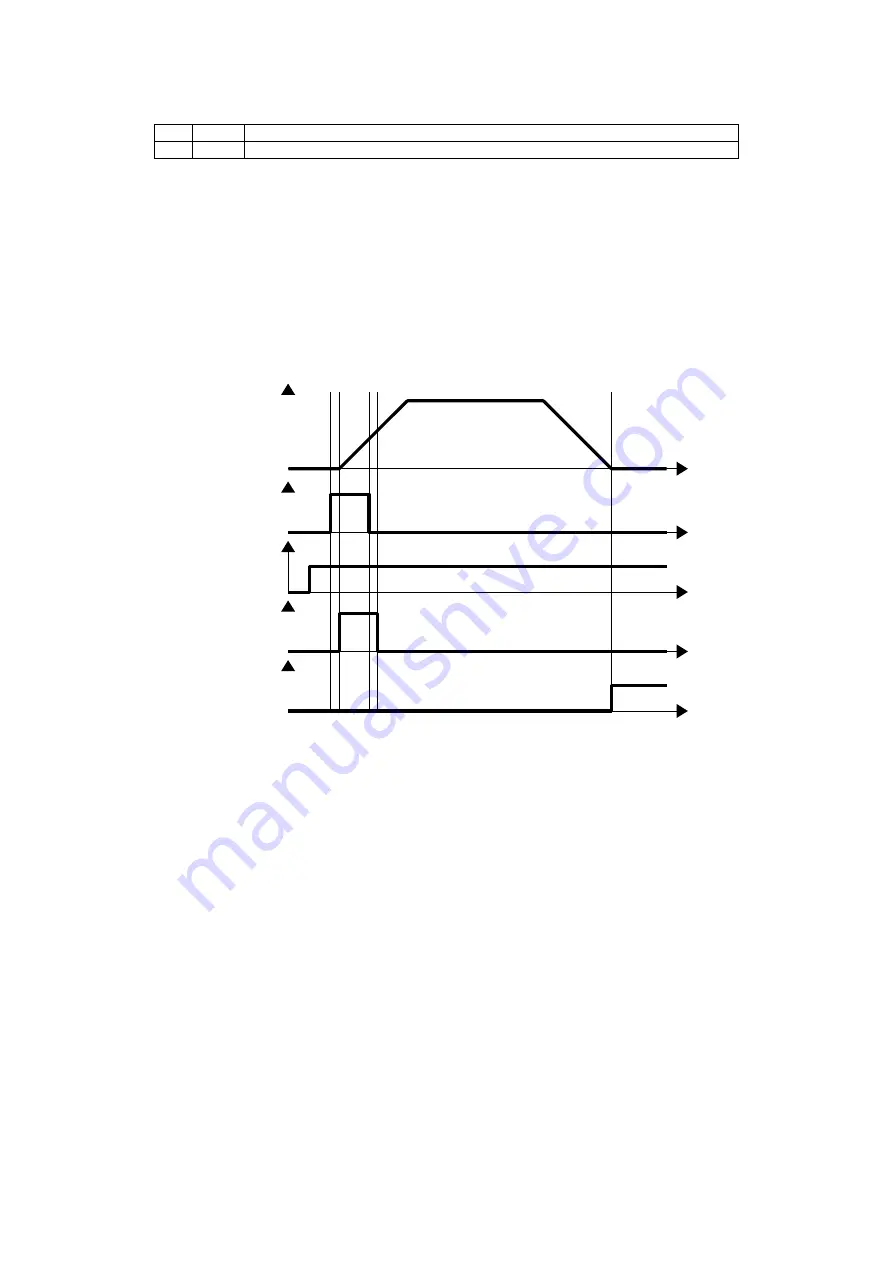
Movement command to new target position can be requested by changing Control word (6040h) of New Set-Point
(Bit 4) from RESET to SET. Once controller receives this request, Set-Point Acknowledge of Status word (Bit 12) is
going to be SET and position movement command executed. Target position refers to Target position (607Ah)
and Position value can be absolute coordinates or relative coordinates by Control word of Relative (Bit 6).
Actual
Speed
t
New
Set-Point
(Bit 4)
t
Target
Position
t
Set-Point
Acknowledge
(Bit 12)
t
Target
Reached
(Bit 10)
t
Figure 4.4: New Set-Point
Once reaches at target position, Status word of Target Reached (Bit 10) goes to SET. If it does not reach at target
position due to error or status as below, Target Reached (Bit 10) can not be changed as SET.
•
Fault status due to Error generation.
•
Out of Operation Enabled Status.
•
Stops during movement due to Limit Switch of operation direction goes to ON.
•
Current position during movement goes out of Software Position Limit (607Dh).
Input next target position
Once commands to move to new target position during previous position movement still operates, executes new
target position movement command after completion of previous position movement. So if already inputs next
target position at
buffer,
position movement command can be executed immediately without time delay.
Содержание ECL E Series
Страница 6: ...Introduction Before Operation 6 ...
Страница 8: ...Chapter 1 Product Specification 10 ...
Страница 9: ...11 1 1 Part Numbering ...
Страница 10: ......
Страница 11: ...13 1 2 Product Dimension Figure 1 3 Dimensions ...
Страница 14: ...Chapter 2 Installation 16 ...
Страница 16: ...2 2 System Configuration EtherCAT Cable Figure 2 1 System Configuration Diagram ...
Страница 17: ...2 3 External Wiring Diagram ...
Страница 18: ......
Страница 24: ... Less than 30V of supplyvoltage Less than 15mA of current flow ...
Страница 26: ...Chapter 3 EtherCAT Communication ...
Страница 27: ... 26 ...
Страница 28: ......
Страница 36: ...Chapter 4 CiA 402 Drive Profile ...
Страница 37: ... 34 ...
Страница 38: ......
Страница 46: ...9 15 Reserved Table 4 12 Profile Position Mode of Control Word Please refer to 4 3 for the rest of bits ...
Страница 52: ...Please refer to drive status control for the rest of bits ...
Страница 66: ...Chapter 5 Operataion ...
Страница 67: ... 59 ...
Страница 72: ...Chapter 6 EtherCAT Object Dictionary ...
Страница 73: ... 63 ...
Страница 82: ......
Страница 89: ...6 EtherCAT Object Dictionary 77 6061h 0 Mode of operation display I8 RO No Tx PDO ...
Страница 107: ...6 EtherCAT Object Dictionary ...







































































