



























No. SX-DSV02829 -
49-
4-3-3 Velocity command acceleration/deceleration setting function
This function controls the velocity by adding acceleration or deceleration command in the driver to the input velocity
command.
Using this function, you can use the soft start when inputting stepwise velocity command or when using internal
velocity setup. You can also use S shaped acceleration/deceleration function to minimize shock due to change in
velocity.
■ Parameters
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
3
12
B
Acceleration time
setup
0–10000
ms/
(1000 r/min)
Set up acceleration processing time in response to the velocity
command input.
3
13
B
Deceleration time
setup
0–10000
ms/
(1000 r/min)
Set up deceleration processing time in response to the velocity
command input.
3
14
B
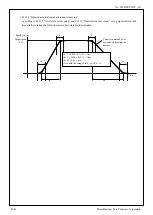
Sigmoid acceleration/
deceleration time
setup
0–1000
ms
Set S-curve time for acceleration/deceleration process when
the velocity command is applied.
*1) For parameter attribute, refer to Section 9-1.
Note: When the position loop is external to the driver, do not use the acceleration/deceleration time setting. Set these
values to 0.
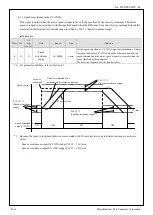
• Pr 3.12 “Acceleration time setup”, Pr 3.13 “Deceleration time setup”
Set the time, elapsing before the velocity command (stepwise input) reaches 1000 r/min after a stepwise velocity
command is input, to Pr 3.12 “Acceleration time setup”. Also set the time, elapsing before the velocity command
reaches 0 r/min from 1000 r/min, to Pr 3.13 “Deceleration time setup”. Assuming that the target value of the
velocity command is Vc (r/min), the time required for acceleration/deceleration can be computed from the formula
shown below.
Acceleration time (ms) = Vc/1000
×
Pr 3.12
×
1 ms
Deceleration time (ms) = Vc/1000
×
Pr 3.13
×
1 ms
Time
Pr 3.12
×
1 ms
Pr 3.13
×
1 ms
Stepwise input velocity command
Velocity command after
acceleration/deceleration process
Speed [r/min]
1000
R1.00
Motor Business Unit, Panasonic Corporation







































































