




























No. SX-DSV02829 -
125-
5-2-15 Viscous friction compensating gain / Model type damping filter application parameter switching function
To select a parameter pattern applied to the viscous friction compensating gain and model
type damping filter, switching between the 1st and 2nd parameter patterns is possible.
For example, it is possible to set the 1st parameter pattern for short pitches and the 2nd
parameter pattern for long pitches and to switch the applied parameter according to the
amount of travel.For switching, bit8 (Pr_SEL1) and bit9 (Pr_SEL2) of 60FEh-01h
(Physical outputs) are used. The relationship with 60FEh-01h (Physical outputs) is as shown
in the following table.
60FEh-01h
Physical
outputs
bit9
Permanently set at 0.
bit8
0
1
Applicable
parameter
Setting pattern
1st parameter pattern
2nd parameter pattern
Viscous friction
compensating gain
1st (Pr6.50)
2nd (Pr6.71)
Low rigidity adaptive filter
1st (Pr6.61 to Pr6.65)
2nd (Pr6.66 to Pr6.70)
1) Scope
Switching is available under the following conditions.
Viscous friction compensating gain/model type damping filter
Working conditions for application parameter switching
Control mode
- 2 degrees of freedom position control is used.
- bit0 and bit5 of Pr6.47 (Function expansion setup 2) are “1.”
Command frequency
- 80M [pulse/s] or below.
60FEh
(Digital outputs)
- 60FEh-01h (Physical outputs) is mapped to PDO.
- bit8 and bit9 of 60FEh-02h (Bit mask) are set to “1.”
2)Precautions
< Precautions on the settings of 60FEh-01h (Physical outputs) and 60FEh-02h (Bit mask)>
- Fix the bit 9 (Pr_SEL2) of 60FEh-01h (Physical outputs) at 0.
- When transition from ESM state to PreOp or later step has been performed, set bit8 (Pr_SEL1) and
bit9 (Pr_SEL2) of 60FEh-01h (Physical outputs) again.
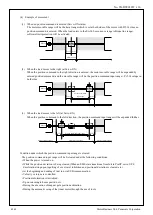
< Precautions on the timing of switching applied parameter pattern >
- Parameter patterns switch according to the settings of 60FEh-01h bit8 and bit9 that define the rise
timing of positional command velocity (before filter).
- One communication cycle or more before inputting a positional command, set bit8 (Pr_SEL1) and bit9
(Pr_SEL2) of 60FEh-01h (Physical outputs) according to the amount of travel of the next operation.
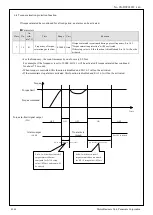
- For switching, the following two conditions must be met: “state where positioning has been completed”
and “during the rising edge of a command in which the positional command is changed from 0 to any
other value within the given time (0.75 ms).
-Note that if the positional command of the next operation is input before positioning has been completed,
switching between the parameter patterns fails.
-When real-time auto tuning is enabled or ESM state is Init, switching is disabled and the 1st parameter
pattern is applied.
3) Parameters
- For information on the viscous friction compensating gain (Pr6.50, Pr6.71), refer to the section 5-2-14.
- For information on the model type damping filter (Pr6.61 to Pr6.65, Pr6.66 to Pr6.70), refer to the
section 5-2-15.
R1.00
Motor Business Unit, Panasonic Corporation







































































