




























No. SX-DSV02829 -
121-
5-2-14 Model type damping filter
This function removes the vibration frequency components from the positional command when a vibration exists in
the leading end of device or with the whole device, and suppresses the overall vibration.
The model type damping filter improves the effectiveness of existing damping filters by removing resonance
frequency components in addition to anti-resonance frequency components. This enables smooth torque commands
and allows better damping effects to be expected. Moreover, since removal of resonance and anti-resonance
frequency components can improve responsivity of the command response filter, improvement of settling time can
be expected. However, unlike existing damping filters, the model type damping filter cannot obtain vibration
components from position sensors in measurements of anti-resonance and resonance frequency components.
Therefore, frequency response analysis needs to be performed to set optimum parameters.
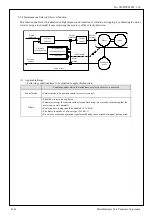
Current
control
Position/
Velocity control
Position
command
Torque
command
Motor
current
Motor
Feedback
Scale
Servo driver
Motor
position
Load
Model type
damping filter
1) Scope
The Model type damping filter operates under conditions below.
Conditions for operation of Model type damping filter
Control mode
- Must be in 2 degrees of freedom positional control.
- Both the bit 0 and bit 5 for Pr6.47(Function expansion setup 2) must be 1.
Command
frequency
Must be 80M[pulse/s] or less.
Other
- The servo is in the On state.
- Elements other than control parameters, such as torque limit, are properly set and the
motor works without any trouble.
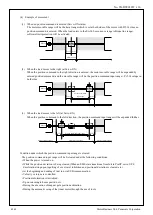
2) Precautions
Under the following conditions, the Model type damping filter may not operate normally or its effect
become lost.
Conditions for inhibition of Model type damping filter operation
Loading condition
- Vibration is induced by factors other than those from command (external force, etc.).
- The following is true with the relationship of resonance frequency and
anti-resonance frequency: 10.0 [Hz]
≦
Anti-resonance frequency <
Resonance frequency
≦
300.0 [Hz]
- The following is true with the relationship of response frequency:
10.0 [Hz]
≦
anti-resonance frequency
≦
response frequency
≦
anti-resonance frequency x 4
≦
300.0 [Hz]
- Cases where resonance damping ratio and anti-resonance damping ratio are
not between 0.001 and 0.999.
3) Limitation
The following are the limitations on the number of filters that can be used.
Limitation
damping filter
- only the 1st damping becomes valid.
Model type damping
filter
- The 1st and the 2nd damping filters cannot be used simultaneously.
Switching is available. For information on the switching function, refer to the
section 5-2-16 “Viscous friction compensating gain/Model type damping filter
application parameter switching function.”
R1.00
Motor Business Unit, Panasonic Corporation







































































