



























No. SX-DSV02829 -
112-
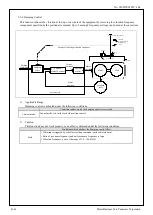
5-2-9 Disturbance observer function
This function uses the disturbance torque determined by the disturbance observer to reduce effect of disturbance
torque and vibration.
Motor + load
+
-
Load model
+
-
Filter
Gain
+
+
Disturbance observer
Added in the
direction to cancel
the disturbance
Set in Pr 6.23
Set in Pr 6.24
Estimated
disturbance torque
Disturbance
torque
Motor velocity
T
orque
command
Torque command
(1) Applicable Range
This function can be applicable only when the following conditions are satisfied.
Conditions under which the disturbance observer is activated
Control model
• Control mode to be position control or velocity control.
Others
• Should be in servo-on condition
• Parameters except for controls such as torque limit setup, are correctly set, assuring that the
motor can operate normally.
• Real-time auto-tuning should be disabled. (Pr 0.02=0)
• Instantaneous velocity observer should be disabled. (Pr 6.10 bit0=0)
• The motor should be of a linear type. (Pr 9.00=1)
• No velocity estimation operation is performed during the execution of magnet pole position.
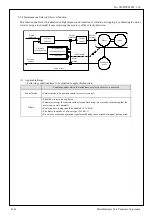
(2) Caution
Effect may not be expected in the following condition.
Conditions which obstruct disturbance observer action
Load
• Resonant frequency is lower than the cutoff frequency estimated by the disturbance observer.
• Disturbance torque contains many high frequency components.
• Scale resolution is low.
R1.00
Motor Business Unit, Panasonic Corporation







































































