





























No. SX-DSV02472 -
90-
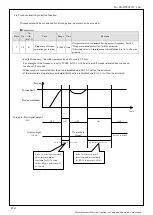
6-2 Motor working range setup function
You can make an alarm stop of the motor with software limit protection when the motor travels exceeding the
movable range which is set up with Pr 5.14 (Motor working range setup) against the position command input range.
You can prevent the work from colliding to the machine end caused by motor oscillation.
(1) Applicable range
□ This function can be applicable only when the following conditions are satisfied.
Conditions under which the software limit works
Control mode
• Position control and full-closed control(Not supported).
Others
• Should be in servo-on condition
• Parameters except for controls such as torque limit setup, are correctly set, assuring that the
motor can run smoothly.
(2) Caution
• This function is not a protection against the abnormal position command.
• When this software limit protection is activated, the motor decelerates and stops according to 605Eh(Fault
reaction option code).
The work (load) may collide to the machine end and be damaged depending on the load during this
deceleration, hence set up the range of Pr 5.14 including the deceleration movement.
• This motor working range setup protection will be disabled during the frequency response functioning of the
communication.
• When changing the control mode (for the purpose of only to control velocity or torque), do not use this
function. Instead, use software limit function or drive inhibit input.
(3) Parameters
Class
No.
At-
trib-
ute *1)
Title
Range
Unit
Function
5
14
A
Motor working
range setup
0–1000
0.1
revolution
You can set up the movable range of the motor against the
position command input range.
When the motor movement exceeds the setup value,
software limit protection will be triggered.
*1) For parameter attribute, refer to Section 9-1.
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation





















































