




























No. SX-DSV02472 -
97-
6-3-4 Sequence at alarm
Set the operation sequence of the alarm status with the exception of the communication related alarm(Err80.*, Err81.*,
Err85.*, Err88.*).
Communication related alarms (Err80.*, Err81.*, Err85.*, Err88.*) information, set by 605Eh (Fault reaction option code).
Please refer to section 6-9-2 "6) Fault reaction option code (605Eh)" of Technical Document "EtherCAT
Communication Specifications" (SX-DSV02473) for details.
(1) Parameters
Class No.
At-
trib-
ute *1)
Title
Range
Unit
Function
5
10
B
Sequence at alarm
0–7
—
Specify the status during deceleration and after stop, after occurrence of alarm.
*1) For parameter attribute, refer to Section 9-1.
(2) Contents
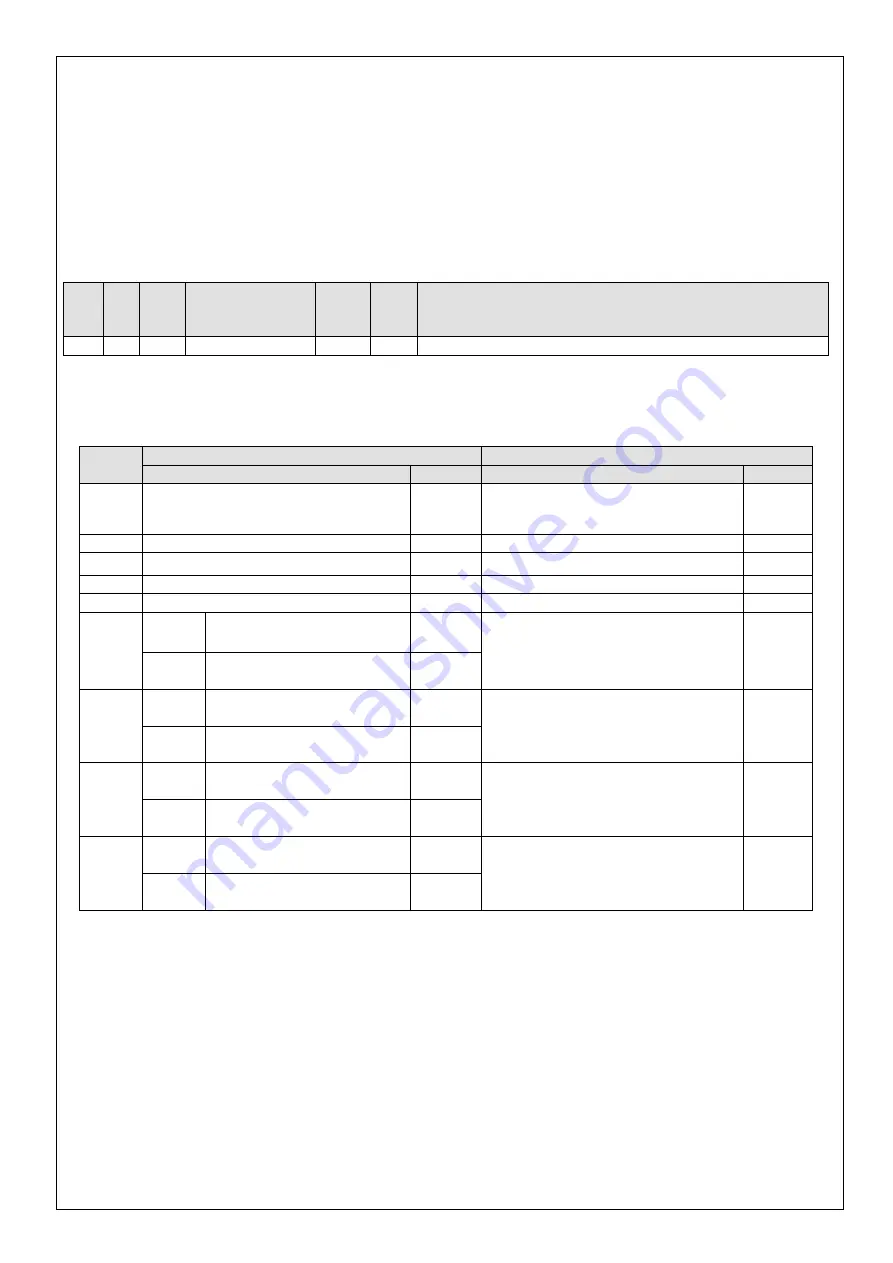
• Details of Pr 5.10 (Sequence at alarm)
Pr 5.10
During deceleration *4)
After stalling (Approx.30 r/min or below)
Stopping method
Deviation
Operation after stopping
Deviation
Common
• Forcibly controls the position. *1)
• Forcibly stops position command generation. *1)
—
• Forcibly controls the position. *1)
• Forcibly stops position command generation. *1)
—
0
• Dynamic brake action
Clear *2) • Dynamic brake action
Clear *2)
1
• Free run (DB OFF)
Clear *2) • Dynamic brake action
Clear *2)
2
• Dynamic brake action
Clear *2) • Free run (DB OFF)
Clear *2)
3
• Free run (DB OFF)
Clear *2) • Free run (DB OFF)
Clear *2)
4
Action A
*3)
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Dynamic brake action
Clear *2)
Action B
*3)
• Dynamic brake action
Clear *2)
5
Action A
*3)
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Dynamic brake action
Clear *2)
Action B
*3)
• Free run (DB OFF)
Clear *2)
6
Action A
*3)
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Free run (DB OFF)
Clear *2)
Action B
*3)
• Dynamic brake action
Clear *2)
7
Action A
*3)
• Emergency stop *3)
• Torque limit =Pr 5.11
Clear *2)
• Free run (DB OFF)
Clear *2)
Action B
*3)
• Free run (DB OFF)
Clear *2)
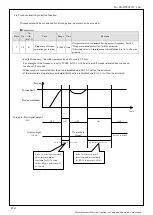
*1) During deceleration sequence or at the stop (during alarm or servo OFF), the system must control the position and
stop the generation of internal position command.
*2) During deviation clearing process, the system causes the internal command position to follow up the feedback position.
When executing the interpolation feed system command after servo ON, first re-set the command coordinate of the
host controller. The motor may operate sharply.
*3) Action of A/B: When an alarm requiring emergency stop occurs, the action A is selected when the setup value in the
table is set within the range 4 to 7, causing emergency stop of operation. When an alarm not requiring emergency stop
occurs, it triggers dynamic braking (DB) specified by action B, or free-running. (Refer to Section 6-3-5.)
Hold the main circuit power until deceleration stop is completed.
For the alarm requiring emergency stop, refer to Section 7-1 Protective function list.
*4) Deceleration period is the time required for the running motor to speed down to 30 r/min. Once the motor speed drops
below 30 r/min, and changes its status after stoppage, it is treated as in stop state regardless of its speed.
R1.05
Motor Business Division, Appliances Company, Panasonic Corporation





















































