





























8-100 Chapter 8 Robot Language Lists
8
A
B
C
D
E
F
G
H
I
J
K
L
M
62
MOVE
●
●
Circular interpolation movement
Execution START condition: Movement of all specified axes is complete (within the tolerance range).
Execution END condition: Movement of all specified axes has begun.
All movement axes arrive at the same time.
In circular interpolation, an arc is generated based on 3 points: the current position, an
intermediate position, and the target position.
Therefore, circular interpolation must be
specified by an even number of points.
SAMPLE
MOVE L,P20 ···················· Linear interpolation movement of robot 1
occurs from the current position to P20.
MOVE C,P21,P22,P23,P20 ········ Circular interpolation movement occurs
through points P21, P22, P23, P20.
MOVE L,P24 ···················· Linear interpolation movement occurs
to P24.
SAMPLE:MOVE C
P23
Current position
P24
P22
P21
P20
33811-R7-00
• Circular interpolation is possible within the following range: radius 0.100mm to 5,000.000mm.
• Circle distortion may occur, depending on the speed, acceleration, and the distance between points.
• On robots with an R-axis, the R-axis speed may become too fast and cause an error, depending
on the R-axis movement distance.
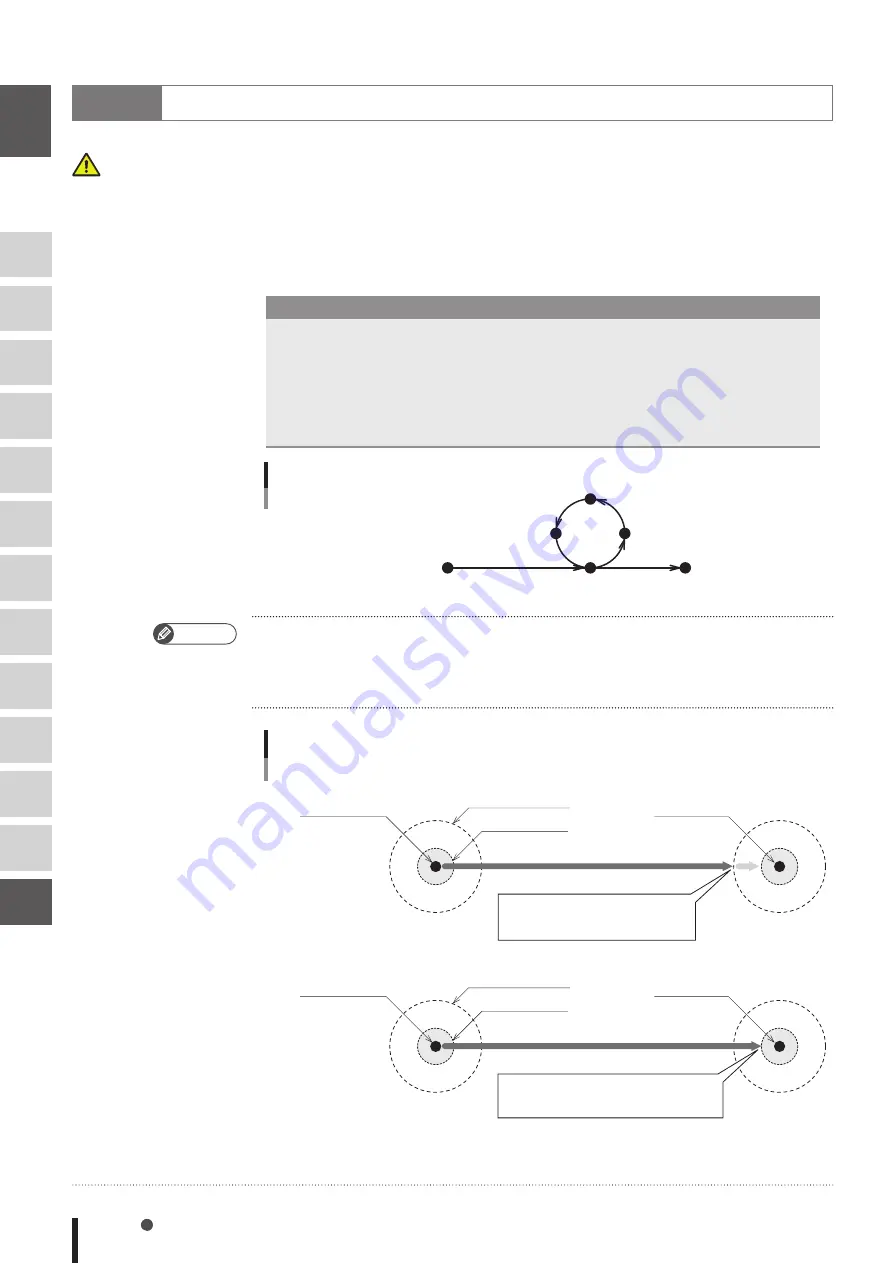
Movement command types and the corresponding movement
Current position
Tolerance range
OUT position range
Target position
Current position
Tolerance range
OUT position range
Target position
The command ends when the axis
enters the OUT position range, and
the next command is then executed.
The next command is executed when
the axis arrives in the tolerance range.
1. PTP movement
2. Linear interpolation movement
33703-R9-00
CAUTION
•
In YRCX, the motion of
interpolation movement
c o m m a n d a n d E N D
condition are different
from conventional model.
Addition of the CONT
setting to the movement
command allows to the
equivalent movement
and END condition in
conventional model.
MEMO
Содержание SCARA YRCX Series
Страница 1: ... 7 6HULHV DW 1R 1 5 5RERW RQWUROOHU 352 5 00 1 0 18 6 5 5RERWV 5 6HULHV ...
Страница 2: ......
Страница 20: ......
Страница 26: ......
Страница 27: ...Chapter 2 Constants 1 1 Outline 2 1 2 2 Numeric constants 2 1 3 3 Character constants 2 2 ...
Страница 28: ......
Страница 32: ......
Страница 52: ......
Страница 54: ......
Страница 61: ...Chapter 5 Multiple Robot Control 1 1 Overview 5 1 2 2 Command list with a robot setting 5 2 ...
Страница 62: ......
Страница 66: ......
Страница 76: ......
Страница 78: ......
Страница 92: ......
Страница 328: ......
Страница 408: ......
Страница 409: ...Chapter 11 User program examples 1 1 Basic operation 11 1 2 2 Application 11 8 ...
Страница 410: ......
Страница 432: ......
Страница 488: ......
Страница 489: ...Chapter 13 Appendix 1 1 Reserved word list 13 1 2 2 Changes from conventional models 13 3 ...
Страница 490: ......
Страница 496: ......
Страница 497: ...Index ...
Страница 498: ......
Страница 504: ......
Страница 505: ......
Страница 506: ... DW 1R 1 XWKRUL HG LVWULEXWRU 3ULQWHG LQ XURSH ...