






















8
5. Applicable Devices and Device Configuration
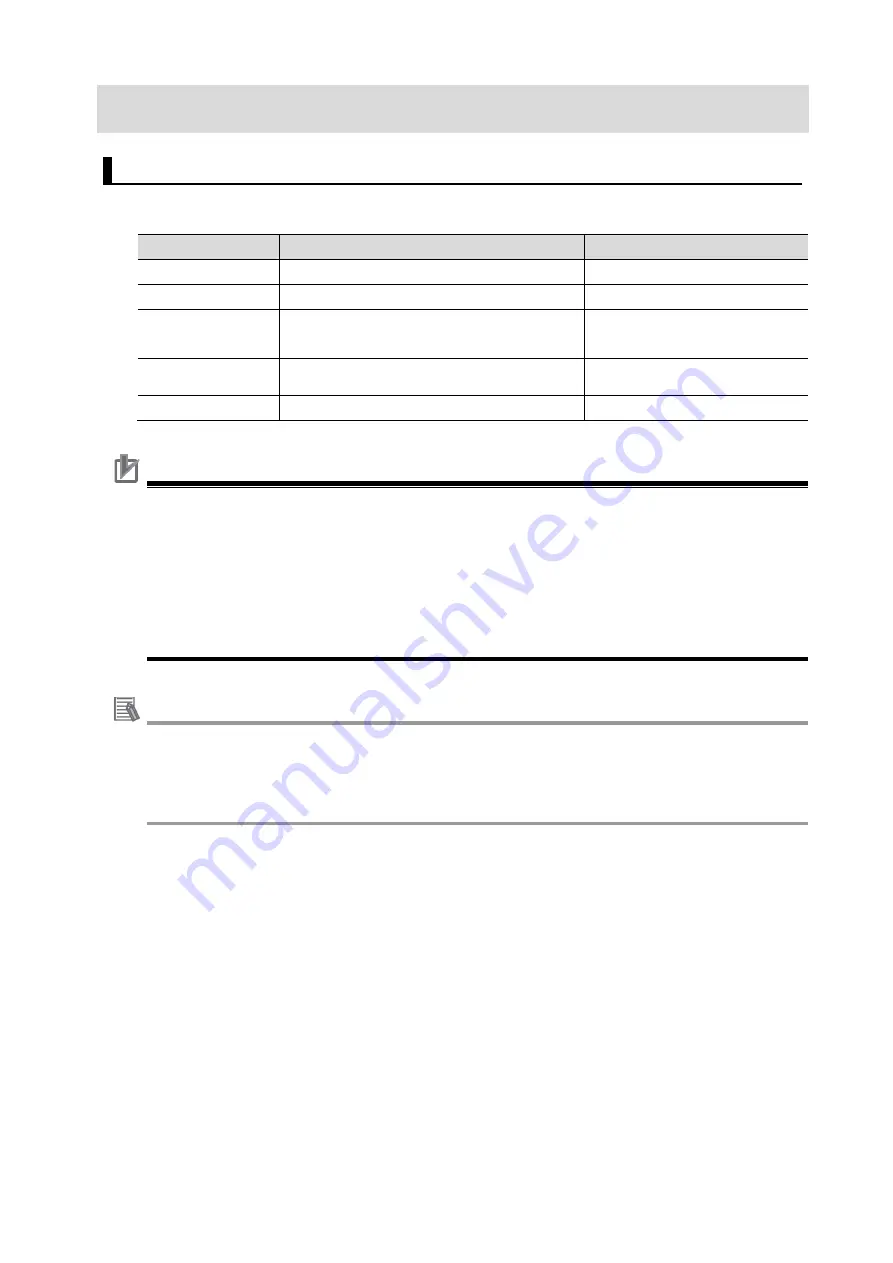
5.1. Applicable Devices
The applicable devices are as follows:
Manufacturer
Name
Model
OMRON
Programmable Multi-Axis Controller
Model CK3E-
□□□□
OMRON
Programmable Multi-Axis Controller
Model CK3M-CPU1
1
OMRON
Programmable Multi-Axis Controller
Industrial Box PC
Model NY51
□
-A
□□□
OMRON
Servo Driver
Model R88D-KN
-ECT
Model R88D-KN
-ECT-L
OMRON
AC Servomotor
Model R88M-K
□
Precautions for Correct Use
In this document, the devices with models and versions listed in
Section 5.2
are used as
examples of applicable devices to describe the procedures to connect the devices and check
their connections.
You cannot use devices with versions lower than the versions listed in
Section 5.2
.
To use the devices mentioned above with models not listed in
Section 5.2
or versions higher
than those listed in
Section 5.2
, check the differences in the specifications by referring to the
manuals before operating the devices.
Additional Information
This document describes the procedures to establish the network connections. It does not
provide information on operations, installations, wiring methods, device functionalities, or
device operations, which are not related to the connection procedures. For more information,
refer to the manuals or contact your OMRON representative.
Содержание R88M-K Series
Страница 11: ...11 6 5 2 Motor Setup 6 5 3 Creation of Operation Check Programs 6 5 4 Project Data Transfer and Operation Check...
Страница 13: ...13 5 From the File menu select New then Project 6 Enter a project name and location and select OK...
Страница 46: ...46 10 Revision History Revision code Revised date Revised content A 5 Apr 2019 First edition...
Страница 47: ...2019 0419 0419 O038 E1 01 Note Do not use this document to operate the Unit...







































































