





























30
8
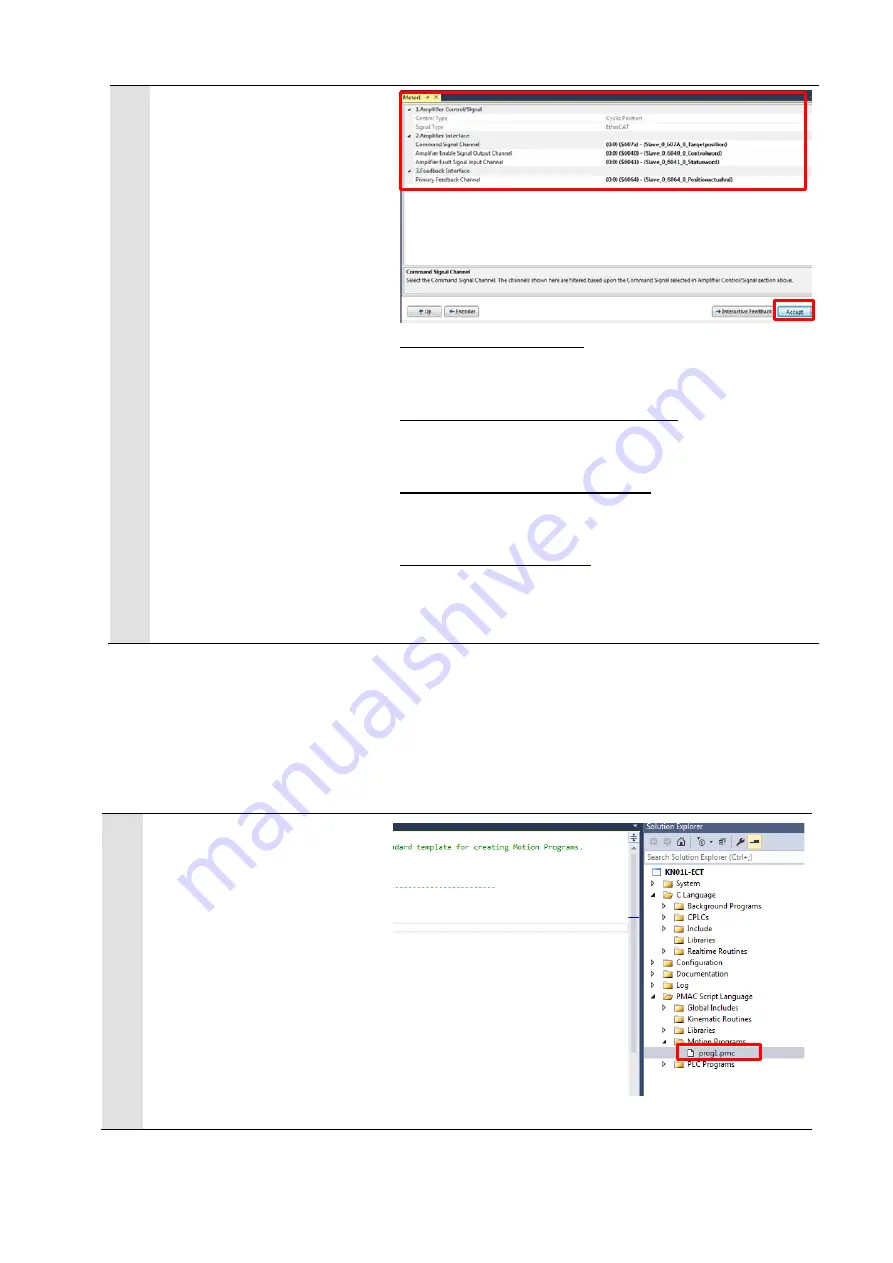
Specify the settings as shown on
the right.
Click the
Accept
button to apply
the settings.
Command Signal Channel
Select
#x607A(Target Position)
, and specify the motor
control indication value for
Target Position
.
Amplifier Enable Signal Output Channel
Select
#x6040(Controlword)
, and specify
Controlword
for the motor output.
Amplifier Fault Signal Input Channel
Select
#x6041(Statusword)
, and specify
Statusword
for
the motor input.
Primary Feedback Channel
Select
#x6064(Position actual value)
, and specify
Position actual value
for the motor control feedback.
Creation of Operation Check Programs
6.5.3.
Create programs to be used to check operations.
A specific language is used for the operation check programs. Refer to
Power PMAC User’s
Manual
and
Power PMAC Software Reference Manual
for details.
1
Creating the Motion program
In the Solution Explorer pane,
open
Project name
–
PMAC
Script Language
–
Motion
Programs
–
prog1.pmc
.
Содержание R88M-K Series
Страница 11: ...11 6 5 2 Motor Setup 6 5 3 Creation of Operation Check Programs 6 5 4 Project Data Transfer and Operation Check...
Страница 13: ...13 5 From the File menu select New then Project 6 Enter a project name and location and select OK...
Страница 46: ...46 10 Revision History Revision code Revised date Revised content A 5 Apr 2019 First edition...
Страница 47: ...2019 0419 0419 O038 E1 01 Note Do not use this document to operate the Unit...







































































