





























A - 5
Appendices
AC Servomotors/Servo Drives 1S-series with Built-in EtherCAT® Communications User’s Manual (I586)
A-
1 CiA
40
2 Drive Prof
ile
A
A-1
-3 Modes of Oper
ation a
nd
App
lied/Adjustmen
t Functio
ns
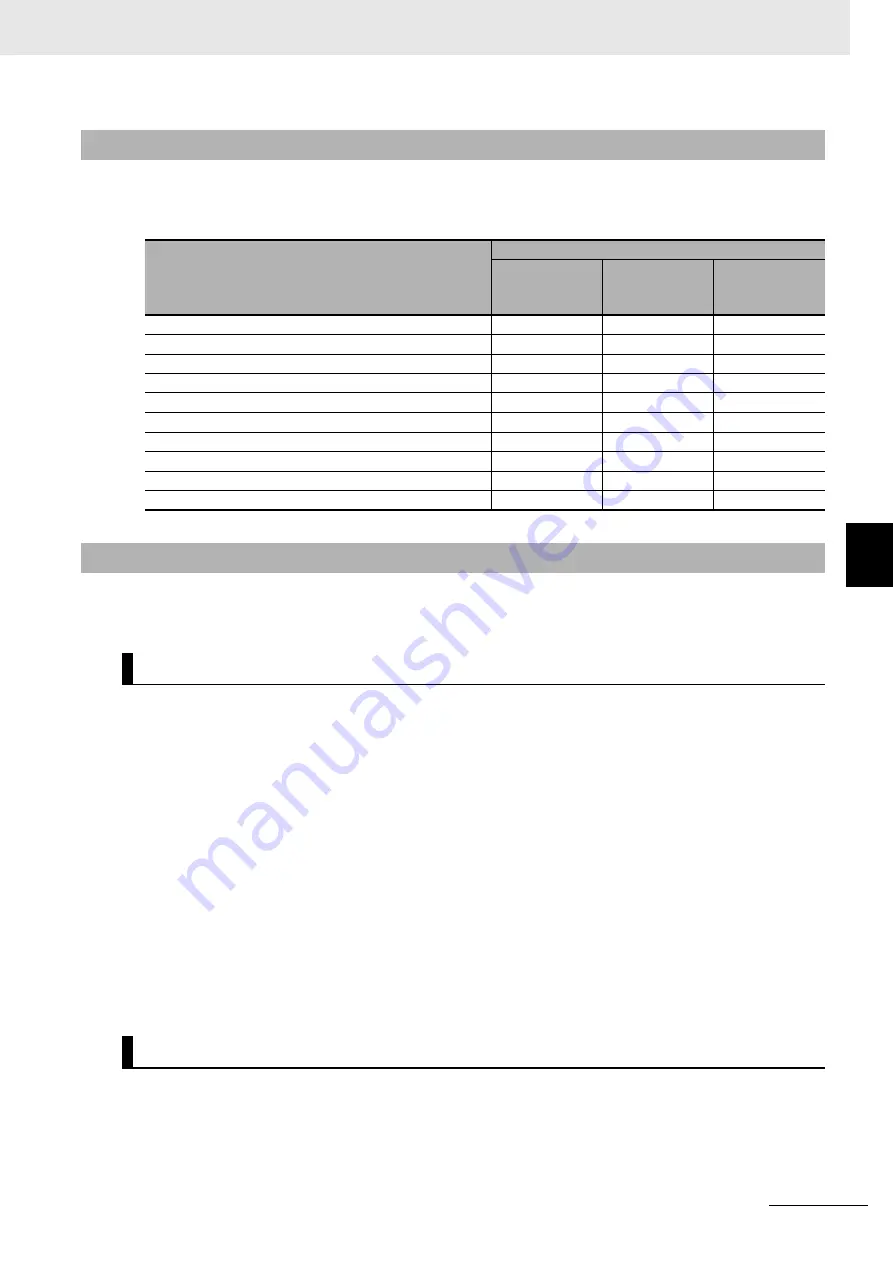
The relationships between the modes of operation of 1S-series Servo Drives with built-in EtherCAT
communications and the applied/adjustment functions are shown below.
The operation mode of the 1S-series Servo Drives with built-in EtherCAT communications is changed
as described below.
The operation mode of the Servo Drive is changed by setting the operation mode from the controller,
and the Servo Drive can operate the Servomotor.
To change the operation mode, change the set value of
Modes of operation
(6060 hex).
The operation mode is changed within two communication cycles after the set value is changed. When
the Homing mode (hm) is changed to another operation mode, the operation mode is changed within 2
ms after the set value is changed.
When you change the operation mode, also change the command value of the object mapped to the
RxPDO.
For example, in Cyclic synchronous position mode (csp), which is a position control mode,
Target Posi-
tion
(607A hex) is enabled as the command value, whereas in Cyclic synchronous velocity mode (csv),
which is a velocity control mode,
Target velocity
(60FF hex) is enabled as the command value.
Therefore, when the operation mode changes from the position control mode to the velocity control
mode, a valid command value must be set in
Target velocity
(60FF hex) at the same time.
You can check the actual operation mode of the Servo Drive from the
Modes of operation display
(6061 hex).
If
Modes of operation
(6060 hex) is set to a value other than 0 (nma), 1 (pp), 3 (pv), 6 (hm), 8 (csp), 9
(csv), or 10 (cst), a warning will occur. If a warning occurs, the operation mode is not changed and the
current operation mode is retained.
A-1-3
Modes of Operation and Applied/Adjustment Functions
Function
Modes of operation
csp
pp
hm
csv
pv
cst
Notch filter
Supported
Supported
Supported
Damping filter
Supported
Not supported
Not supported
Velocity feed-forward function
Supported
Not supported
Not supported
Torque feed-forward function
Supported
Supported
Not supported
Position Command Filter
Supported
Not supported
Not supported
Velocity Command Filter
Not supported
Supported
Not supported
Torque command filter
Supported
Supported
Supported
Load characteristic estimation function
Supported
Supported
Supported
Friction torque compensation function
Supported
Supported
Not supported
Gain switching function
Supported
Supported
Supported
A-1-4
Changing the Mode of Operation
Changing the Mode of Operation
Changing to an Unsupported Control Mode
Содержание R88D-1SN ECT Series
Страница 544: ...7 Applied Functions 7 52 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 560: ...8 Safety Function 8 16 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 700: ...10 Operation 10 10 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586...
Страница 969: ...AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 I 1 I Index...
Страница 972: ...I 4 AC Servomotors Servo Drives 1S series with Built in EtherCAT Communications User s Manual I586 Appendices...
Страница 973: ......