





























Chapter 3: Robot Installation
Use Sysmac Studio Software
When the EtherCAT node ID is set with Sysmac Studio, it is retained in non-volatile memory
and will persist after subsequent power cycles.
Additional Information
: Refer to the Sysmac Studio for more information about
setting the EtherCAT node ID with software.
IMPORTANT:
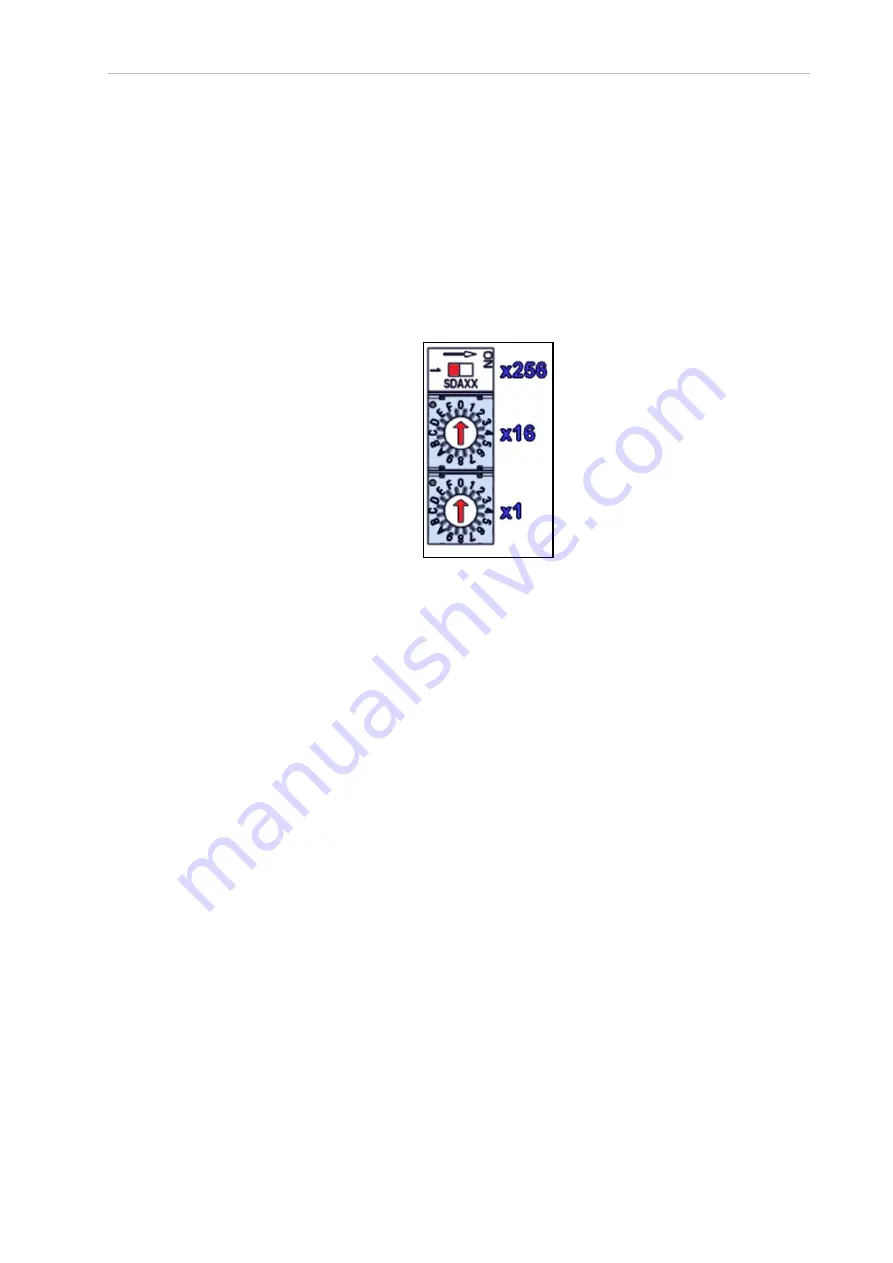
When using Sysmac Studio to set the EtherCAT node ID, ensure
the switches are set to the default 0 positions as shown in the figure below. If the
switches are set to a non-zero value, the switch positions will dictate the
EtherCAT node ID and software adjustment of this value is not possible.
Figure 3-13. EtherCAT Node ID 0 Switch Setting
Setting the EtherCAT Node ID Using Hardware Switches
The robot interface panel has three physical switches that can be used for setting the EtherCAT
node ID (address) as described in the figure below.
The switch settings are checked when robot 24 VDC power is applied.
IMPORTANT:
Turn OFF AC and DC power before changing EtherCAT node ID
switches.
22792-000 Rev. A
iX3 565 Robot with EtherCAT User’s Manual
53