



























SMART2 Installation and Operation Manual 1
36
Chapter 4
SMART2 CAN Bus
The SMART2 supports the transmission of NMEA2000 messages over the CAN bus.
By default, CAN is disabled on the SMART2. Critical CAN configuration parameters such as Para-
meter Group Numbers (PGNs), addresses and priorities are system-specific and must be expli-
citly configured.
The addresses and PGNs are typically allocated when the overall CAN bus topology is determ-
ined. A Node has a unique CAN J1939 NAME and address.
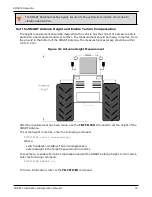
The SMART2 has internal CAN transceivers, however they still require proper bus
terminations.
Refer to
Table 19: SMART Antennas Interface Cable Connector Pin Out
on page 73 for pin-out
information.
The SMART2 supports the following NMEA2000 Parameter Group Messages (PGN) over the CAN
bus:
l
PGN 126992 System Time
l
PGN 129025 GNSS Position Rapid Update
l
PGN 129026 COG & SOG Rapid Update
l
PGN 129027 Position Delta High Precision Rapid Update
l
PGN 129029 GNSS Position
l
PGN 129551 GNSS Differential Signal
The following commands and logs are used for CAN configuration:
l
CANCONFIG
command: controls the CAN transceiver hardware and places the receiver
on
bus
or
off bus
l
J1939CONFIG
command: assigns the CAN J1939 NAME and address parameters to a Node
l
J1939STATUS
log: reports the status a Node on the J1939 CAN network, such as the
claimed address
l
LOG CCOMx PGNabcd
: configures the NMEA2000 messages
CCOM ports with a lower port number have a higher transmission priority.
For information about these commands, see the
Agriculture Commands and Logs Refer-
.
Details for the PGN messages can be found in the NMEA2000 specification which can be
purchased directly from the National Marine Electronics Association (
).