





























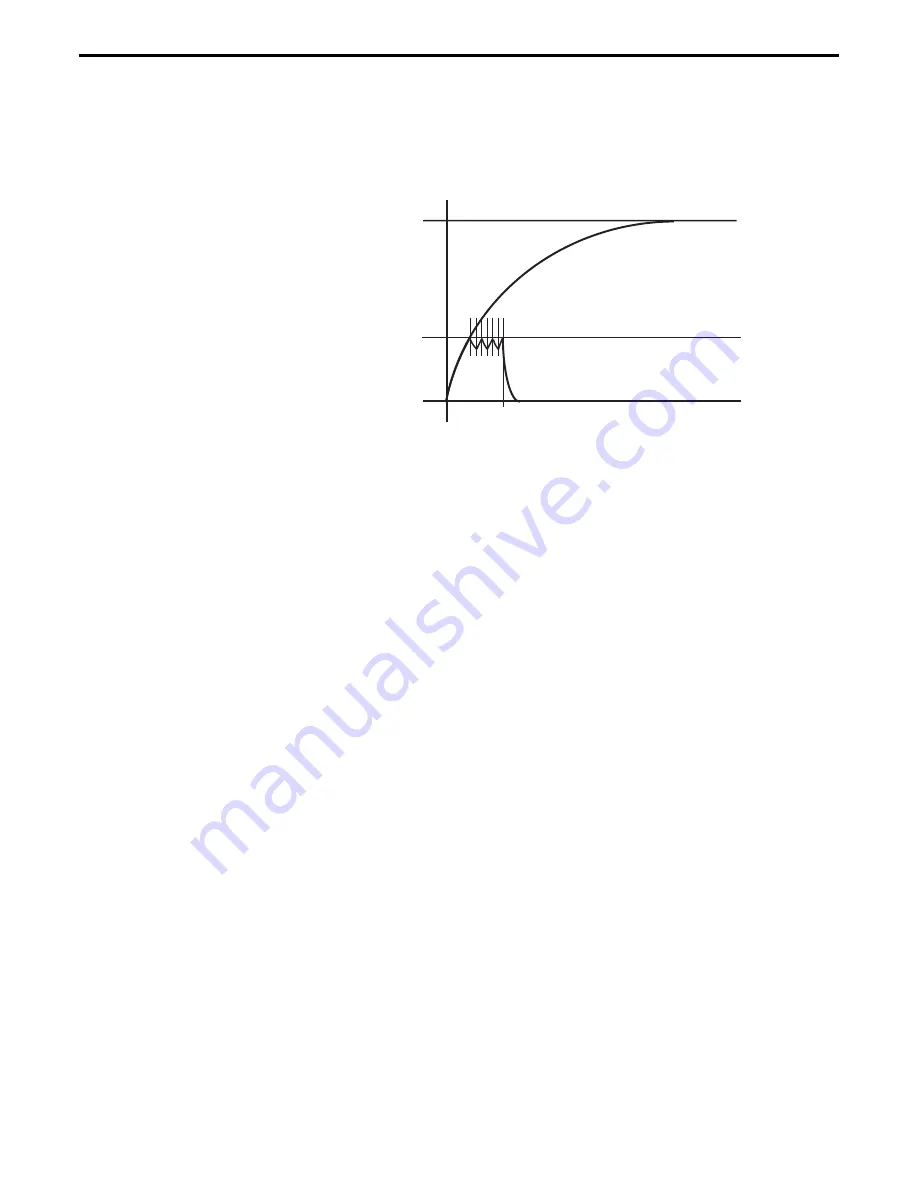
If, for instance, a stepper motor requiring only 3V to reach the
nominal current is connected momentarily to 30V, it will reach the
same current on only 1/10 of the time (
Figure 5.47
).
Phase ON
nominal current
Figure 5.47: Motor Pulse with High Voltage Chopper
Once the desired current value is reached, a chopper circuit activates
to keep the current close to the nominal value.
5.7.2 Unipolar – Bipolar Drivers
In the examples described in Section 5.7.1: Stepper Motor Drivers,
each phase has its own commutator (transistor) to control the current
that flows through it. Having one end permanently connected to the
power source, the current will flow through each phase always in the
same direction. For this reason, these types of drivers are called
Unipolar.
On the other hand,
Figure 5.48
shows a
Bipolar
Driver built in a dual
H-bridge configuration. The name "H-Bridge" comes from the
topology of the transistors controlling one load (coil). In this case, by
turning on diagonally transistors (1-4 or 2-3), the current could be
made to flow either way through the coil. This means that the driver
can control not just the intensity of the magnetic field generated by
the stator, but also its polarity. Implicitly, the only stepper motors that
can be used with such a driver are the ones with polarized rotors, the
Permanent Magnet, and the Hybrid types.
The question that arises from the driver configuration is how to
connect a Four Phase stepper motor to a driver that drives only two
coils. This could be accomplished in three different ways, each one
with its own advantages and disadvantages:
1. Use only two adjacent phases (e.g., phase #1 and #2).
•
Advantage
– simplicity
Section 5 – Motion Control Tutorial
5-35
Содержание ESP300 Series
Страница 1: ...ESP300 Motion Controller Driver User s Manual...
Страница 4: ...ESP300 1999 EU Declaration of Conformity iv Preface...
Страница 29: ...This page is intentionally left blank Section 2 Modes of Operation 1 15...
Страница 30: ......
Страница 230: ...4 16 Section 4 Advanced Capabilities...
Страница 274: ...This page is intentionally left blank 6 6 Section 6 Servo Tuning...
Страница 290: ...This page is intentionally left blank B 6 Appendix B Trouble Shooting and Maintenance...